How to troubleshoot "Constraint violated::" errors
Hello,
I am trying to get basic motion planning working in RViz. Planning fails at random and I see messages like the following:
Constraint violated:: Joint name: 'shoulder', actual value: 0.813020, desired value: 0.813453, tolerance_above: 0.000100, tolerance_below: 0.000100
I could not find any information on:
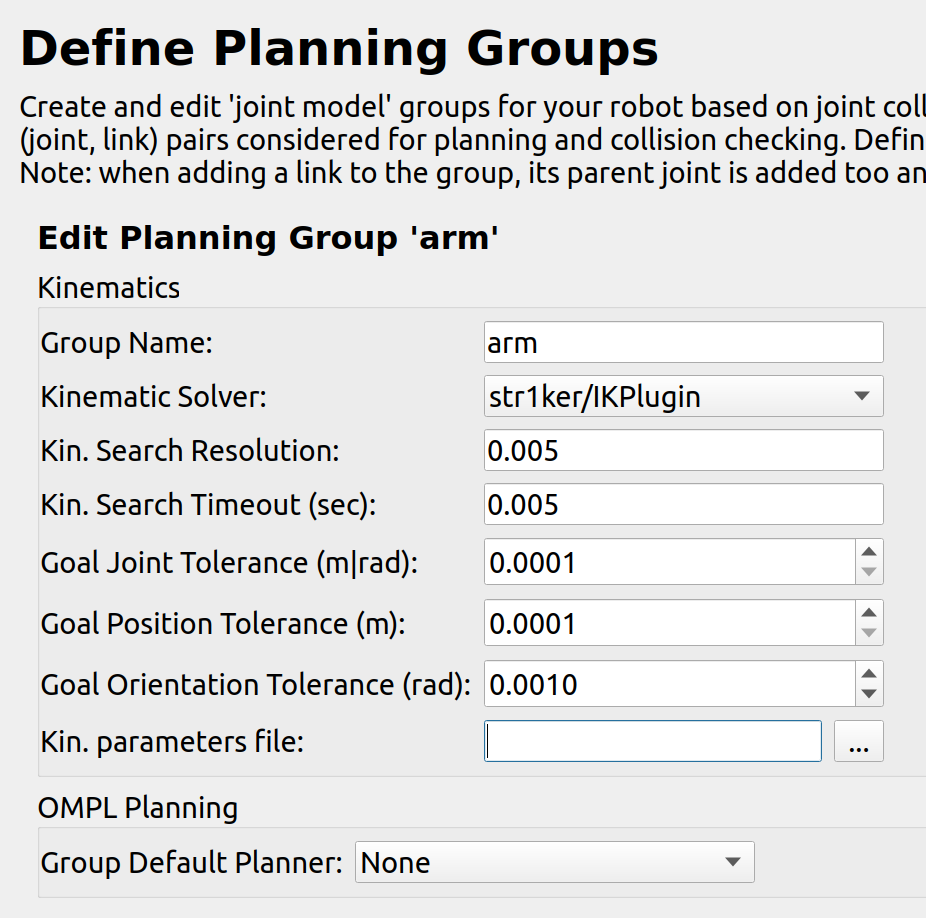
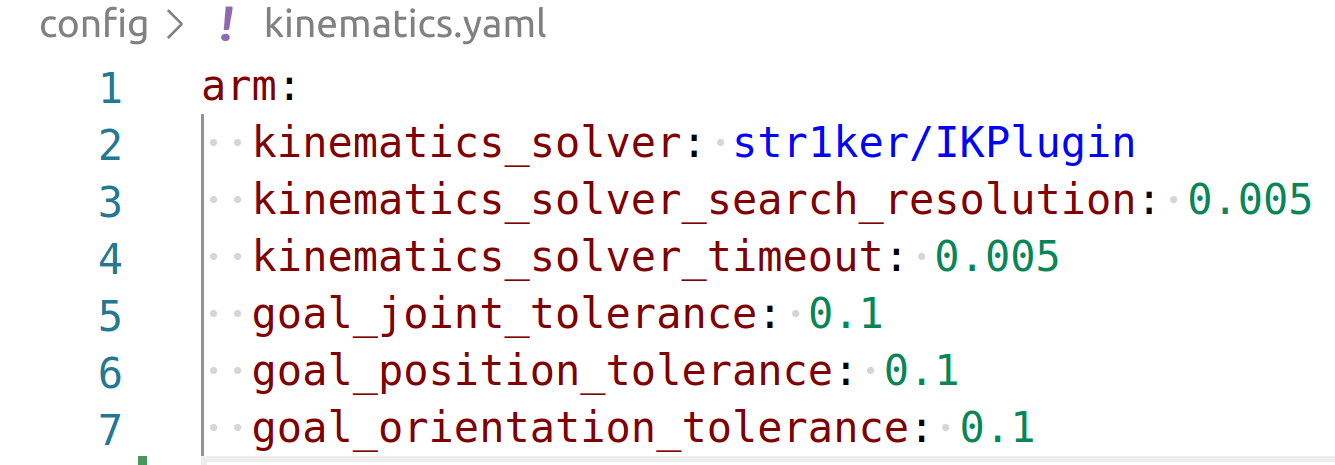
- Which file "tolerance_above" and "tolerance_below" settings are configured in
- How to change them
- How it's possible that the robot state does not match the joint states returned from the IK solver (which seems to be the source of this error).
My understanding of the planning pipeline is that the goal pose from RViz marker is sent to the move group, it finds an IK plugin to use, asks the IK plugin to return a solution for all of the active joints using the goal pose, then creates a robot state to represent the goal, and sets all the joints to solutions returned by IK. If the IK plugin does limit checking and clamps the solution for each joint to its limits, then I don't see how the goal robot state could end up with different values. In this case different by 0.0004, which honestly I don't even care about (would rather increase tolerance and move on).
Appreciate your help!
Description: https://github.com/01binary/str1ker/t...
MoveIt Config: https://github.com/01binary/str1ker_m...