
RTABMap Ground Plain Off
Hi,
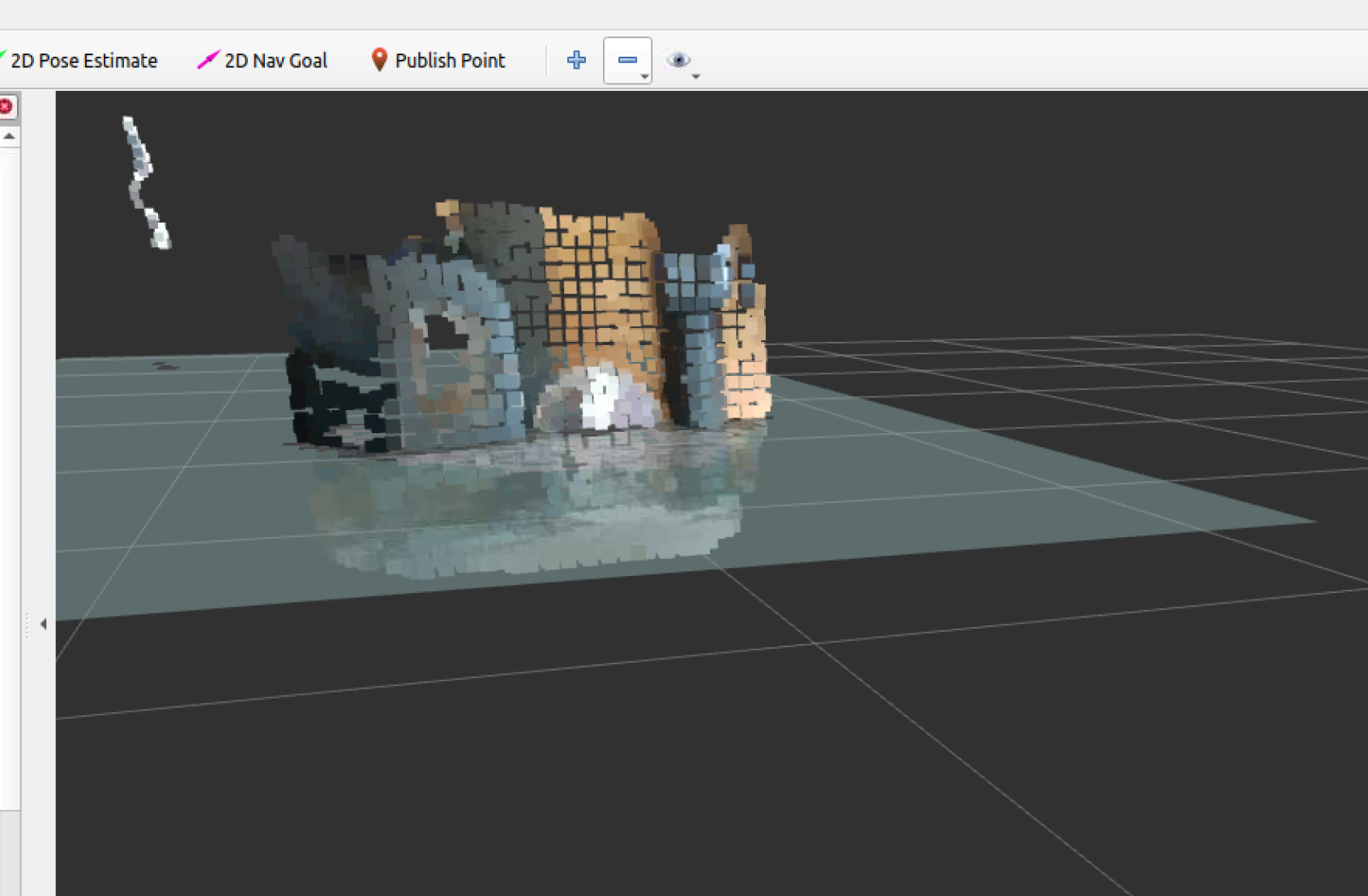
I've having problems getting the ground plan on rtabmap to show correctly. The pic below shows the ground plan beneath the grid floor. How can I correct this please. I've tried some static transforms but they haven't worked.
https://www.dropbox.com/s/8rng8qk9c8k...
Incorrect Camera Optical Frame??
https://www.dropbox.com/s/xgminqnsig6...
Full TF tree:
https://www.dropbox.com/s/s8en0mc5wvl...
RTABMap Startup Parameters
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.16.0
* /rtabmap/rgbd_odometry/approx_sync: False
* /rtabmap/rgbd_odometry/approx_sync_max_interval: 0.0
* /rtabmap/rgbd_odometry/config_path:
* /rtabmap/rgbd_odometry/expected_update_rate: 0.0
* /rtabmap/rgbd_odometry/frame_id: camera_link
* /rtabmap/rgbd_odometry/ground_truth_base_frame_id:
* /rtabmap/rgbd_odometry/ground_truth_frame_id:
* /rtabmap/rgbd_odometry/guess_frame_id:
* /rtabmap/rgbd_odometry/guess_min_rotation: 0.0
* /rtabmap/rgbd_odometry/guess_min_translation: 0.0
* /rtabmap/rgbd_odometry/keep_color: False
* /rtabmap/rgbd_odometry/max_update_rate: 0.0
* /rtabmap/rgbd_odometry/odom_frame_id: odom
* /rtabmap/rgbd_odometry/publish_tf: True
* /rtabmap/rgbd_odometry/queue_size: 10
* /rtabmap/rgbd_odometry/subscribe_rgbd: False
* /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2
* /rtabmap/rgbd_odometry/wait_imu_to_init: False
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/approx_sync: False
* /rtabmap/rtabmap/config_path:
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: camera_link
* /rtabmap/rtabmap/gen_depth: False
* /rtabmap/rtabmap/gen_depth_decimation: 1
* /rtabmap/rtabmap/gen_depth_fill_holes_error: 0.1
* /rtabmap/rtabmap/gen_depth_fill_holes_size: 0
* /rtabmap/rtabmap/gen_depth_fill_iterations: 1
* /rtabmap/rtabmap/gen_scan: False
* /rtabmap/rtabmap/ground_truth_base_frame_id:
* /rtabmap/rtabmap/ground_truth_frame_id:
* /rtabmap/rtabmap/initial_pose:
* /rtabmap/rtabmap/landmark_angular_variance: 9999.0
* /rtabmap/rtabmap/landmark_linear_variance: 0.0001
* /rtabmap/rtabmap/map_frame_id: map
* /rtabmap/rtabmap/odom_frame_id:
* /rtabmap/rtabmap/odom_frame_id_init:
* /rtabmap/rtabmap/odom_sensor_sync: False
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.001
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.001
* /rtabmap/rtabmap/publish_tf: True
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/scan_cloud_max_points: 0
* /rtabmap/rtabmap/subscribe_depth: True
* /rtabmap/rtabmap/subscribe_odom_info: True
* /rtabmap/rtabmap/subscribe_rgb: True
* /rtabmap/rtabmap/subscribe_rgbd: False
* /rtabmap/rtabmap/subscribe_scan: False
* /rtabmap/rtabmap/subscribe_scan_cloud: False
* /rtabmap/rtabmap/subscribe_scan_descriptor: False
* /rtabmap/rtabmap/subscribe_stereo: False
* /rtabmap/rtabmap/subscribe_user_data: False
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
Realsense Startup Parameters
PARAMETERS
* /camera/realsense2_camera/accel_fps: 250
* /camera/realsense2_camera/accel_frame_id: camera_accel_frame
* /camera/realsense2_camera/accel_optical_frame_id: camera_accel_opti...
* /camera/realsense2_camera/align_depth: True
* /camera/realsense2_camera/aligned_depth_to_color_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye1_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye2_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_fisheye_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_infra1_frame_id: camera_aligned_de...
* /camera/realsense2_camera/aligned_depth_to_infra2_frame_id: camera_aligned_de...
* /camera/realsense2_camera/allow_no_texture_points: False
* /camera/realsense2_camera/base_frame_id: camera_link*
* /camera/realsense2_camera/calib_odom_file:
* /camera/realsense2_camera/clip_distance: -1.0
* /camera/realsense2_camera/color_fps: 15
* /camera/realsense2_camera/color_frame_id: camera_color_frame
* /camera/realsense2_camera/color_height: 480
* /camera/realsense2_camera/color_optical_frame_id: camera_color_opti...
* /camera/realsense2_camera/color_width: 640
* /camera/realsense2_camera/confidence_fps: 30
* /camera/realsense2_camera/confidence_height: 480
* /camera/realsense2_camera/confidence_width: 640
* /camera/realsense2_camera/depth_fps: 15
* /camera/realsense2_camera/depth_frame_id: camera_depth_frame
* /camera/realsense2_camera/depth_height: 480
* /camera/realsense2_camera/depth_optical_frame_id: camera_depth_opti...
* /camera/realsense2_camera/depth_width: 640
* /camera/realsense2_camera/device_type:
* /camera/realsense2_camera/enable_accel: True
* /camera/realsense2_camera/enable_color: True
* /camera/realsense2_camera/enable_confidence: True
* /camera/realsense2_camera/enable_depth: True
* /camera/realsense2_camera/enable_fisheye1: False
* /camera/realsense2_camera/enable_fisheye2: False
* /camera/realsense2_camera/enable_fisheye: True
* /camera/realsense2_camera/enable_gyro: True
* /camera/realsense2_camera/enable_infra1: True
* /camera/realsense2_camera/enable_infra2: True
* /camera/realsense2_camera/enable_infra: False
* /camera/realsense2_camera/enable_pointcloud: False
* /camera/realsense2_camera/enable_pose: False
* /camera/realsense2_camera/enable_sync: True
* /camera/realsense2_camera/filters:
* /camera/realsense2_camera/fisheye1_frame_id: camera_fisheye1_f...
* /camera/realsense2_camera/fisheye1_optical_frame_id: camera_fisheye1_o...
* /camera/realsense2_camera/fisheye2_frame_id: camera_fisheye2_f...
* /camera/realsense2_camera/fisheye2_optical_frame_id: camera_fisheye2_o...
* /camera/realsense2_camera/fisheye_fps: 15
* /camera/realsense2_camera/fisheye_frame_id: camera_fisheye_frame
* /camera/realsense2_camera/fisheye_height ...

{kind=link}
{kind=link}
{kind=link}
You may not enough karma to upload an image, can you add a link to image uploaded somewhere else?
Thanks - I've added a link