
Sw_urdf exporter - How to define the Base_Link

Hi there,
I am using sw_urdf exporter plugin within Solidworks? http://wiki.ros.org/sw_urdf_exporter
I am defining the links and joints as this tutorial explains: https://www.youtube.com/watch?v=xNT3W...
However, I am not sure which parts to select to define as base_link, if should I select just the shafts or all the parts above the shafts (cab, bucket, tanks, etc..)
I am not sure which model makes sense to ROS-URDF for simulation purposes (Center of mass, axis-reference, inertia) if I consider these other parts as base-link or not (just the shafts) ?
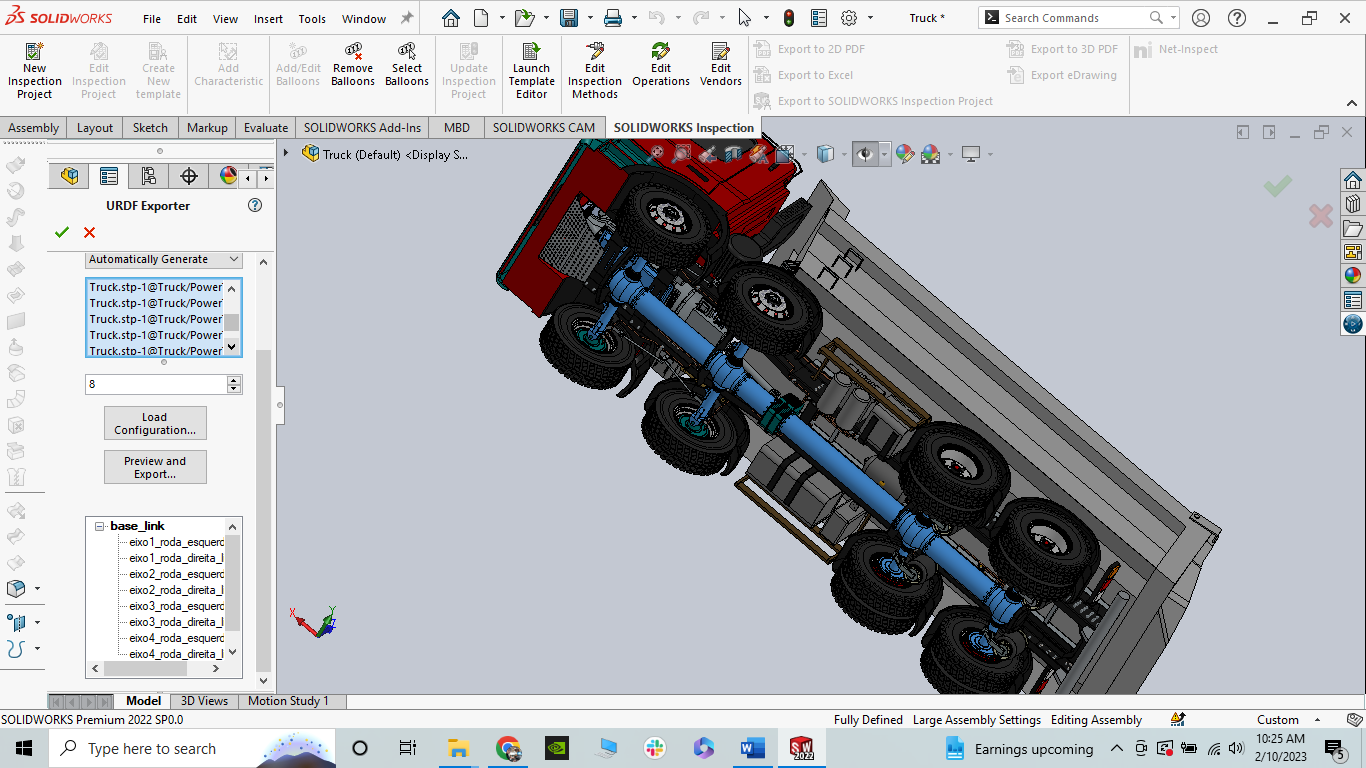
If I select just the blue shaft, I lose all the other parts:

In addition the orientation and pose from tires didn`t workas expected ( I followed cautiosly the instruction from here https://www.youtube.com/watch?v=xNT3W...)
I would be very glad for some explanation, previous use-case of this plugin with the same purpose ( share a link please), etc...
Thanks in advance

