
Robot and Map are Static in rviz (navigation_stack)

So guys i am using the navigation stack.I am able to set the pose and send the goal to my robot car it tries to reach it .
The problem is that the map and the polygon shape in rviz are not moving . (take a picture of what i am meaning):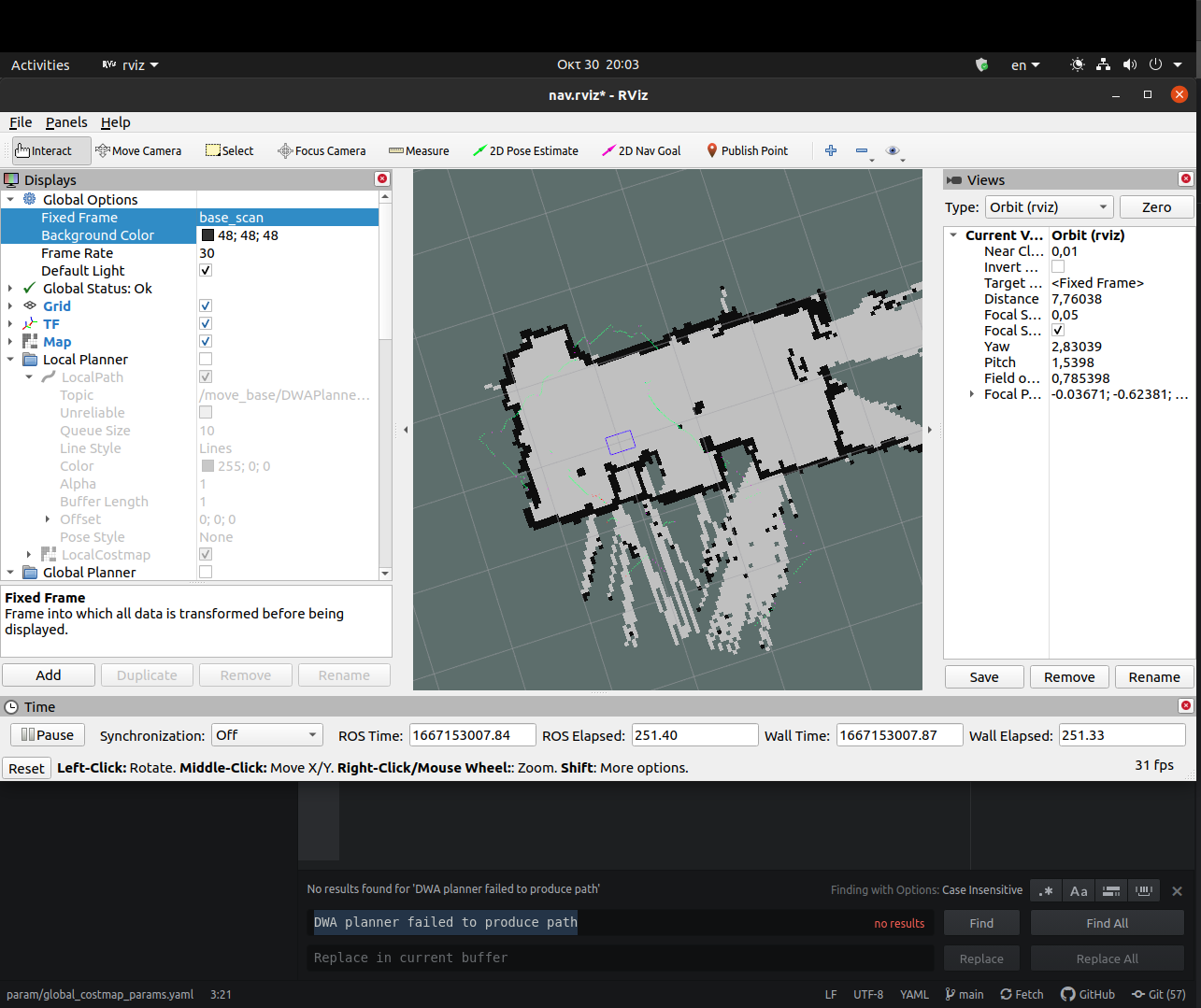
As you can barely see the robot is the blue square and its position is the starting position ...
Again, as you can barely see the laser scan dots are not placed exact on the original map and that is because the real robot has moved in the environment (i am using odometry etc ).
In the picture you can see the fixed frame base_scan but i have tried it with every frame i've got and the problem still exists .
P.S. : I Cant use the navigation properly if i cant fix this problem and i have no idea why is this happening .PLZ i need your help i am searching for days to get an answer but it seems that none has the same problem , i guess . I also posted another question about that but didn't even got any views ... sooo i hope i am luckier this time cause i am running out of time .
