
pr2 gazebo headless not working

Hello all,
I am having a trouble with launching pr2 gazebo headless version. I tried to launch launch/pr2.launch in pr2_gazebo package. It stops responding or publishes broken tf messages. pr2_empty_world.launch works just fine but pr2.launch.
Does anybody know what is going on? It seems like the recent update broke the package.

{kind=link}
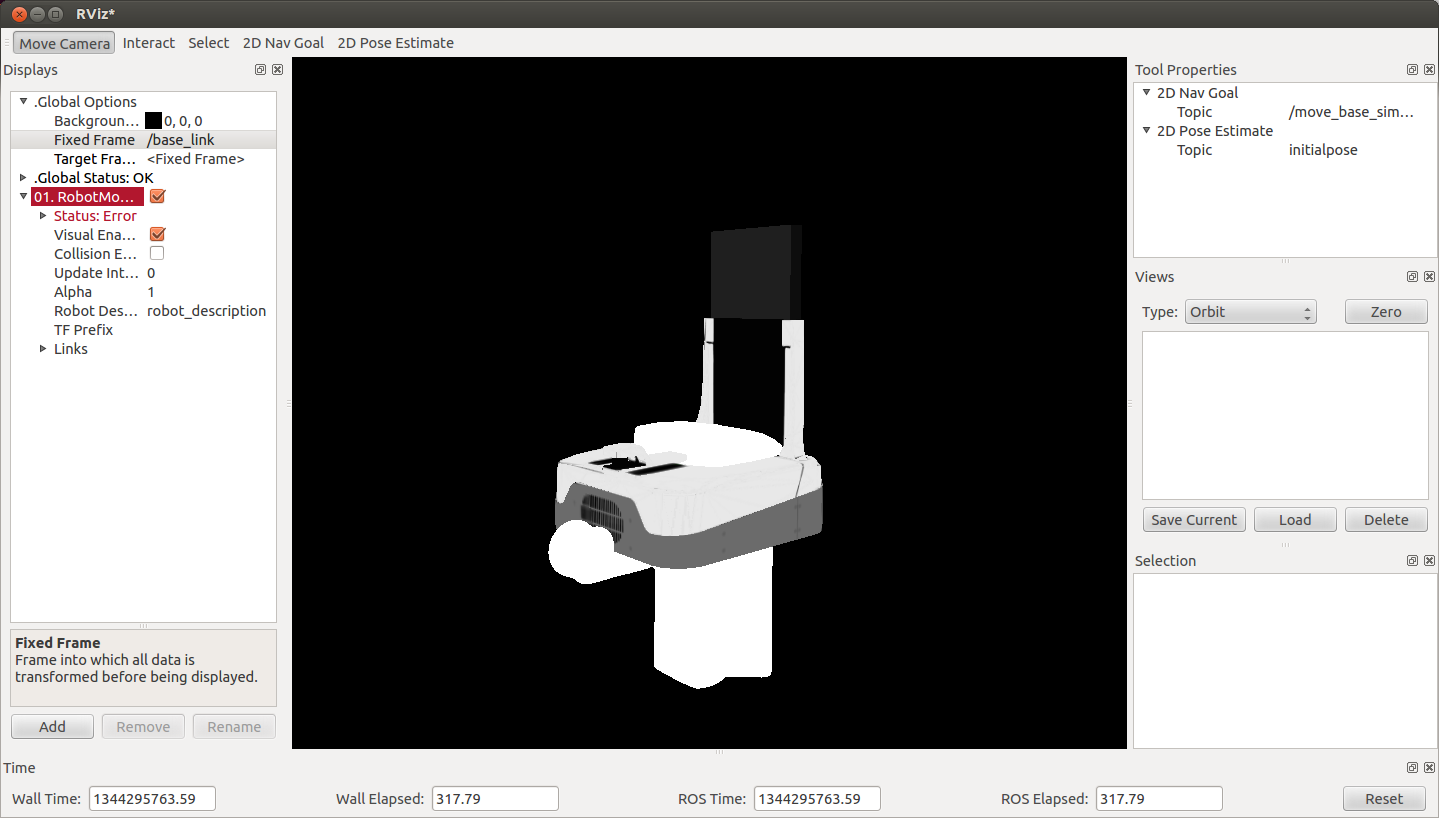
It doesn't seem that there are any messages published on /tf
view_frame showed me that a broken tf tree. some tf messages are missing and unconnected. BTW, I got the headless working. I had to launch the gazebo empty_world with setting argument "gui" false.
how can I reproduce the error?
I just did roslaunch pr2_gazebo pr2.launch with newly installed desktop in precise-fuerte.
Thanks, ticketed (https://bitbucket.org/osrf/gazebo/issue/9/headless-mode-is-not-working)