
ROS2 topic name validation
Is there a way to validate topic names in rclcpp? For ROS1 I was using the validate function defined here.
Is there anything that is equivalent in C++ for ROS2?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Is there a way to validate topic names in rclcpp? For ROS1 I was using the validate function defined here.
Is there anything that is equivalent in C++ for ROS2?
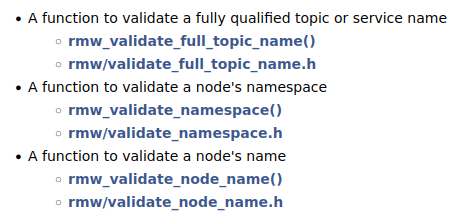
There are some common utility functions in combination with "Topics" or "Services" in rmw: ROS Middleware Abstraction Interface:
https://docs.ros2.org/latest/api/rmw/
Asked: 2022-03-14 15:09:39 -0600
Seen: 263 times
Last updated: Mar 15 '22
Is it possible to have memory mapped messages in ROS?
basic question in understanding publishing and subscribing
Can I "overload" topic names in ROS? (Different versions by datatype)
Subscribing to the odometry topic
who is heading the development of ROS?
Problem using subscribed motor position topic
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
