
ROS2 topic name validation
Is there a way to validate topic names in rclcpp? For ROS1 I was using the validate function defined here.
Is there anything that is equivalent in C++ for ROS2?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Is there a way to validate topic names in rclcpp? For ROS1 I was using the validate function defined here.
Is there anything that is equivalent in C++ for ROS2?
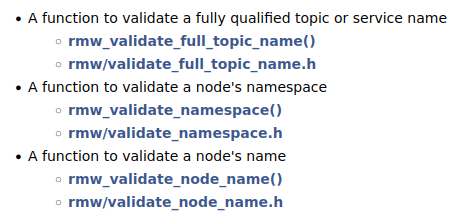
There are some common utility functions in combination with "Topics" or "Services" in rmw: ROS Middleware Abstraction Interface:
https://docs.ros2.org/latest/api/rmw/
Asked: 2022-03-14 15:09:39 -0500
Seen: 189 times
Last updated: Mar 15 '22
Can we pass multiple config files to a node in ROS2
Exception while calling service of node '<my_node>' : None
Problems with a Bazel build of ROS2
Best way to integrate ndarray into ros2 [closed]
Loading map using a service call
Proper runtime executable install location
Failed to create process installing ROS2 in windows
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
