
How to interpret the values of the current position of the joints?
Hello everyone! I have a manipulator with MoveIt and rospy and I use method
get_current_joint_values()
for getting current state of joints.
But I want to get the values like it is on the picture
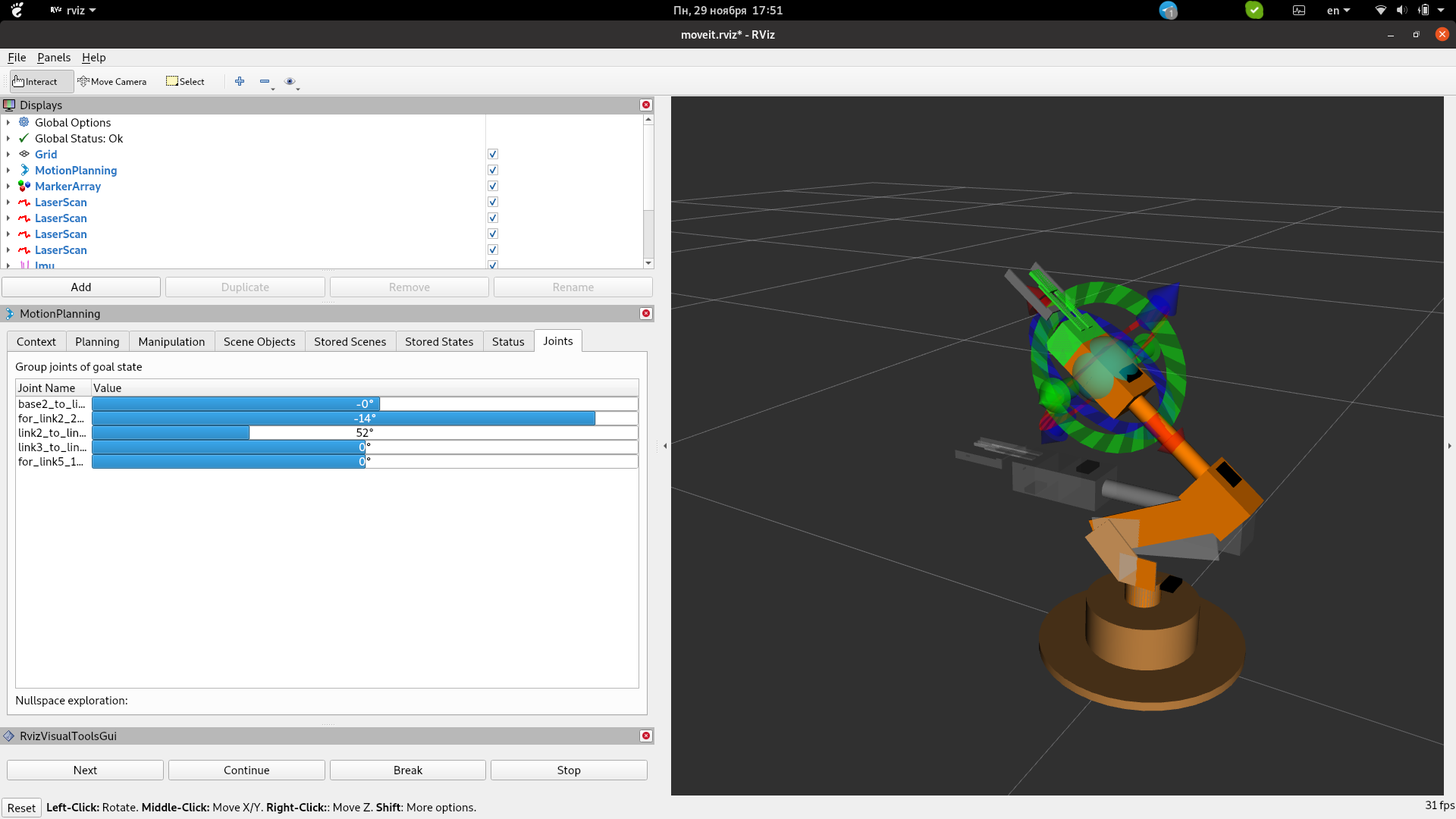 How can I convert coordinates from output like
How can I convert coordinates from output like
[7.30249639134854e-05, -0.5748639571155212, 1.110629325310894, 6.552529423497617e-05, -6.95780344773084e-05]to angles like on the picture?
add a comment
