
inaccurate cost value

The cost value of cells inside local costmap is comming inaccurate as a result the robot is considering it has stuck. I'm using neo local planner as local_base_planner for my robot with move_base. Here the function which is calcuating the cost value of given cell is:
double get_cost(costmap_2d::Costmap2DROS* cost_map_ros, const tf2::Vector3& world_pos)
{
auto cost_map = cost_map_ros->getCostmap();
int coords[2] = {};
cost_map->worldToMapEnforceBounds(world_pos.x(), world_pos.y(), coords[0], coords[1]);
return cost_map->getCost(coords[0], coords[1]) / 255.;
}
The screenshot of robot being stuck is:
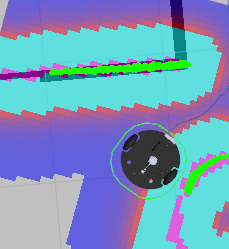
The warning msg i'm getting at this time is:
We are stuck: yaw_error=-0.466964, obstacle_dist=-0.350000, obstacle_cost=0.992157, delta_cost_x=2.010893
The source code of neo_local_planner is here.
As i observed after stuck robot is not executing the recovery_behaviour like rotate_recovery. When i list the parameteres of move_base i see the enable_recoverY_behaviour parameter but didn't see which recovery_behaviour is currently set or way to set/change this value. What am i mission?
I am currently testing my robot in gazebo simulator. ROS version: Noetic OS: Ubuntu 20.04
