How to troubleshoot Rviz2 not receiving map from cartographer?
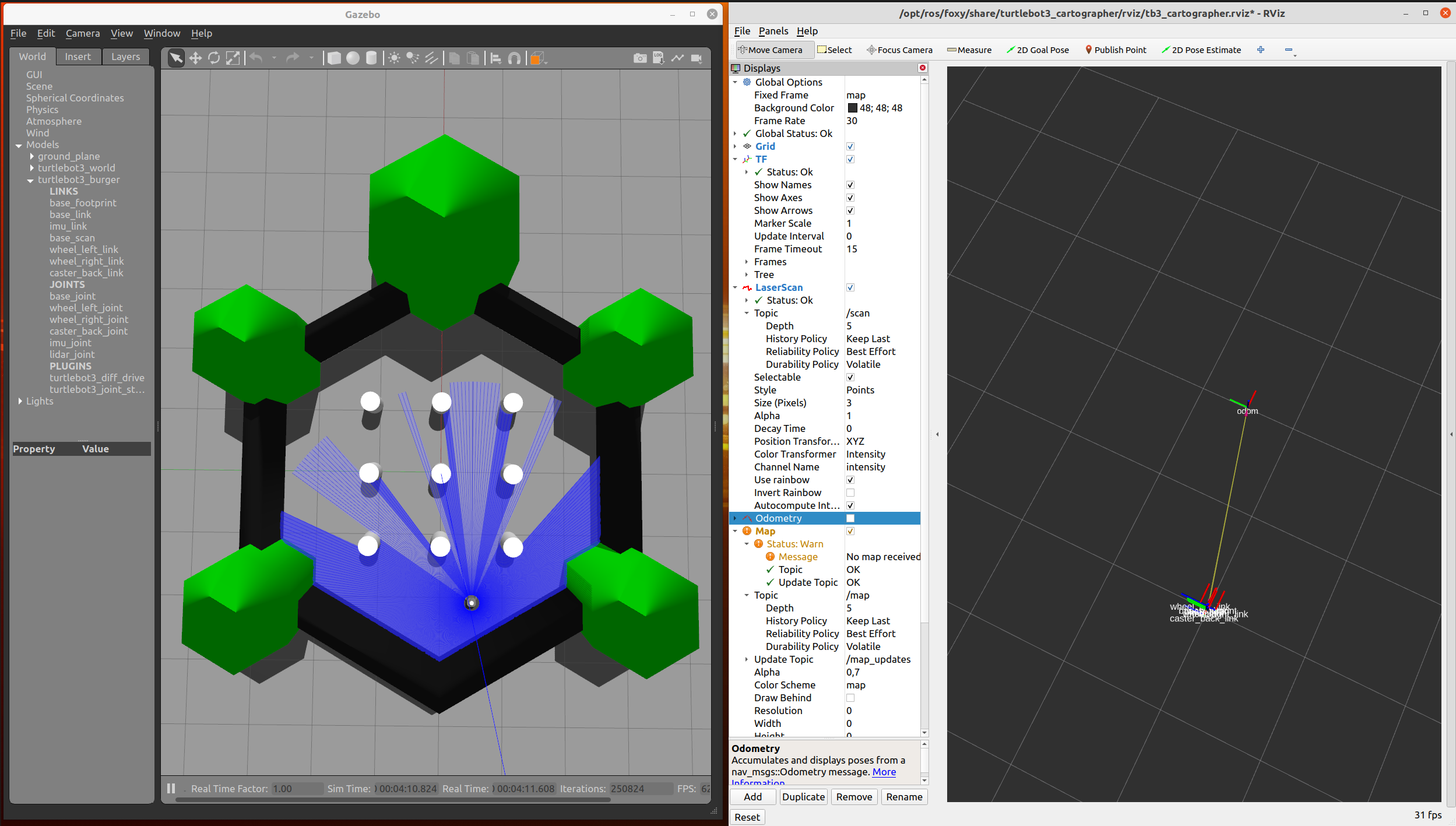
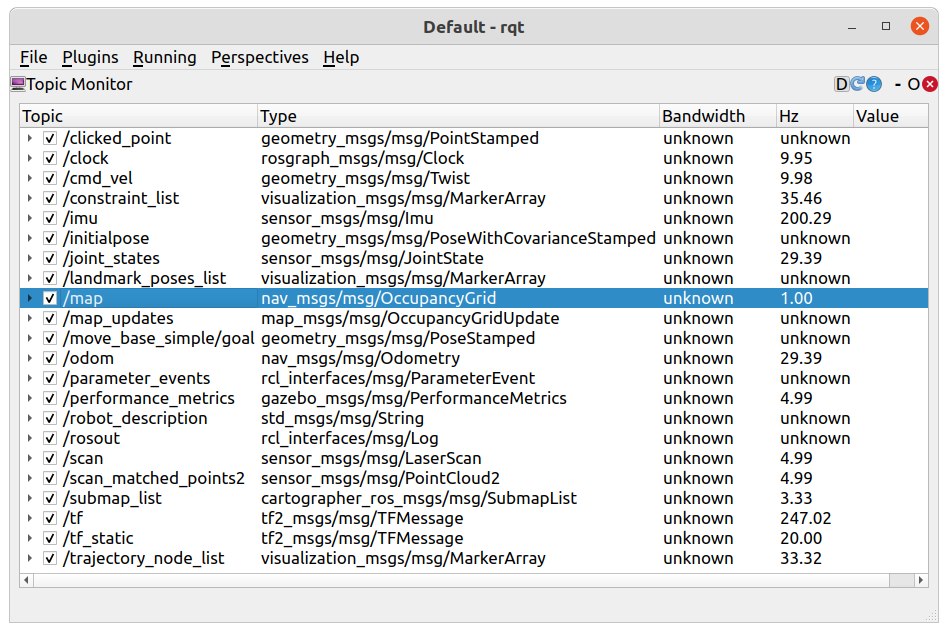
Rviz2 doesn't receive anymore Turtlebot 3 lidar readings, nor the map being built by cartographer. Cartographer makes the map allright, in fact I can have it saved in the end, and topics /scan and /map have messages going over them; still Rviz2 doesn't seem to receive them, nor display them. The same happens both with Gazebo and with a real Turtlebot.
Running Foxy under Ubuntu 20.04.
These are the commands I run (taken from the Turtlebot 3 e-manual). The setup.bash from /opt/ros/foxy and my workspace are already sourced in every shell I use, as well as TURTLEBOT3_MODEL is set to burger.
# Start gazebo
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
# Start cartographer and Rviz2
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
# Start the teleoperation node
ros2 run turtlebot3_teleop teleop_keyboard
# Drive around and save the map
ros2 run nav2_map_server map_saver_cli -f ~/map
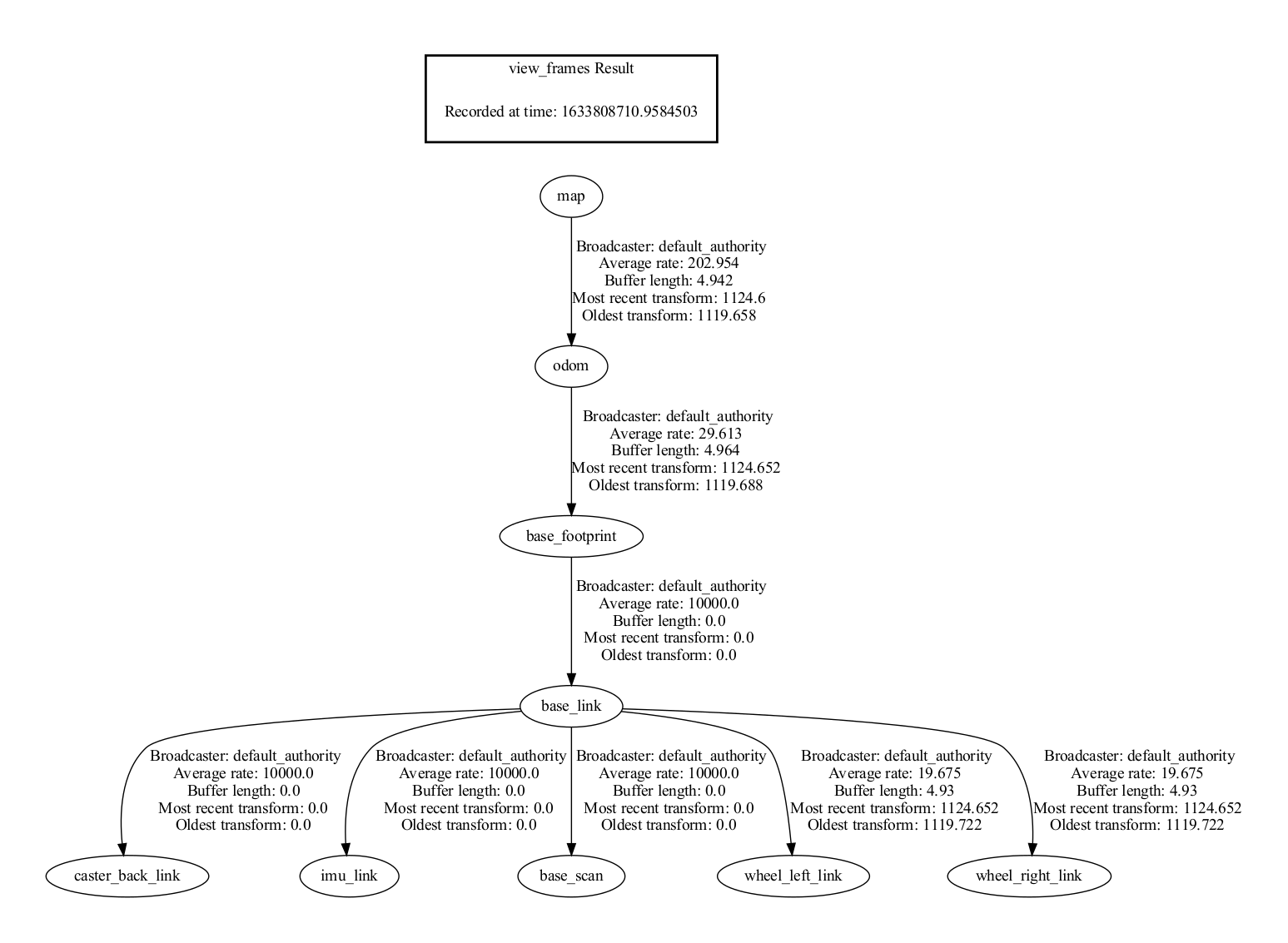
I am attaching a screenshot of Gazebo and Rviz2, and the output of view_frames.py. Also pasting the output of Gazebo and Cartographer to console.
Anything I should try, or additional information I can collect to troubleshoot the issue?
[UPDATE] Since the problem occurred right after Foxy got updated during a round of sudo apt upgrade, I think the issue is likely related to this https://github.com/ros2/rviz/issues/782