
Compare two odoms with different frames with EVO

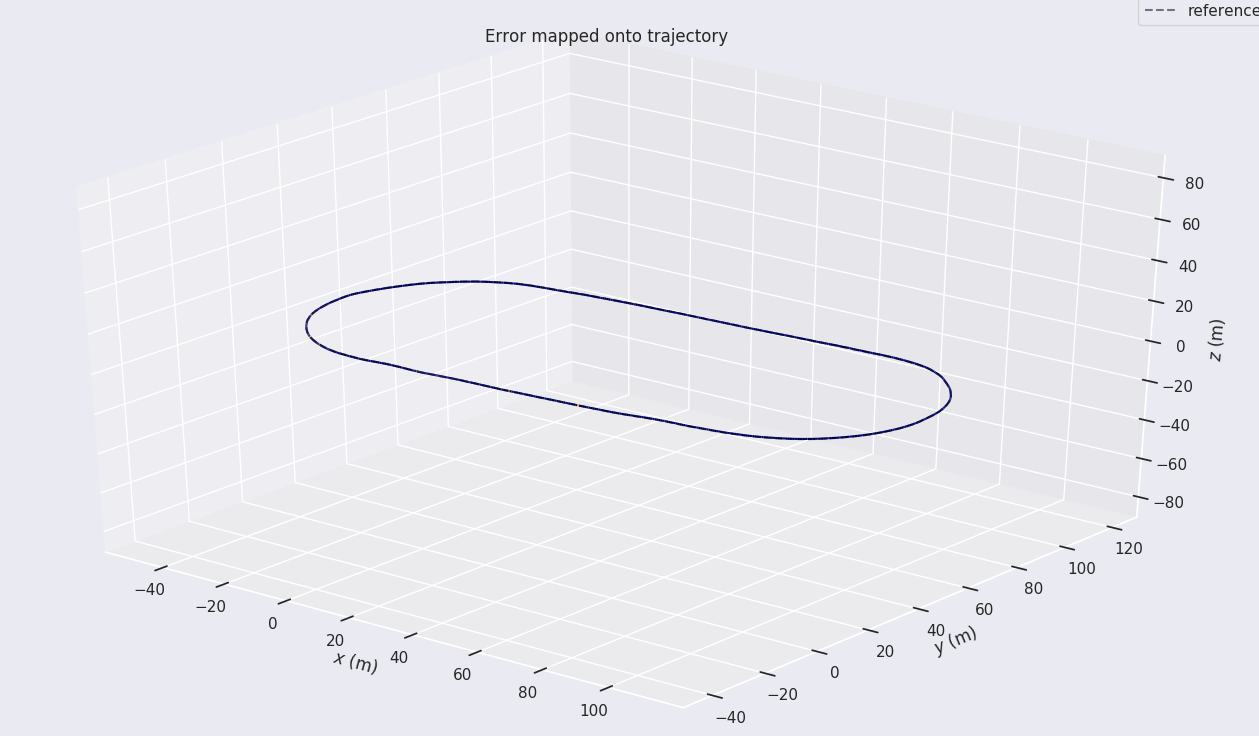
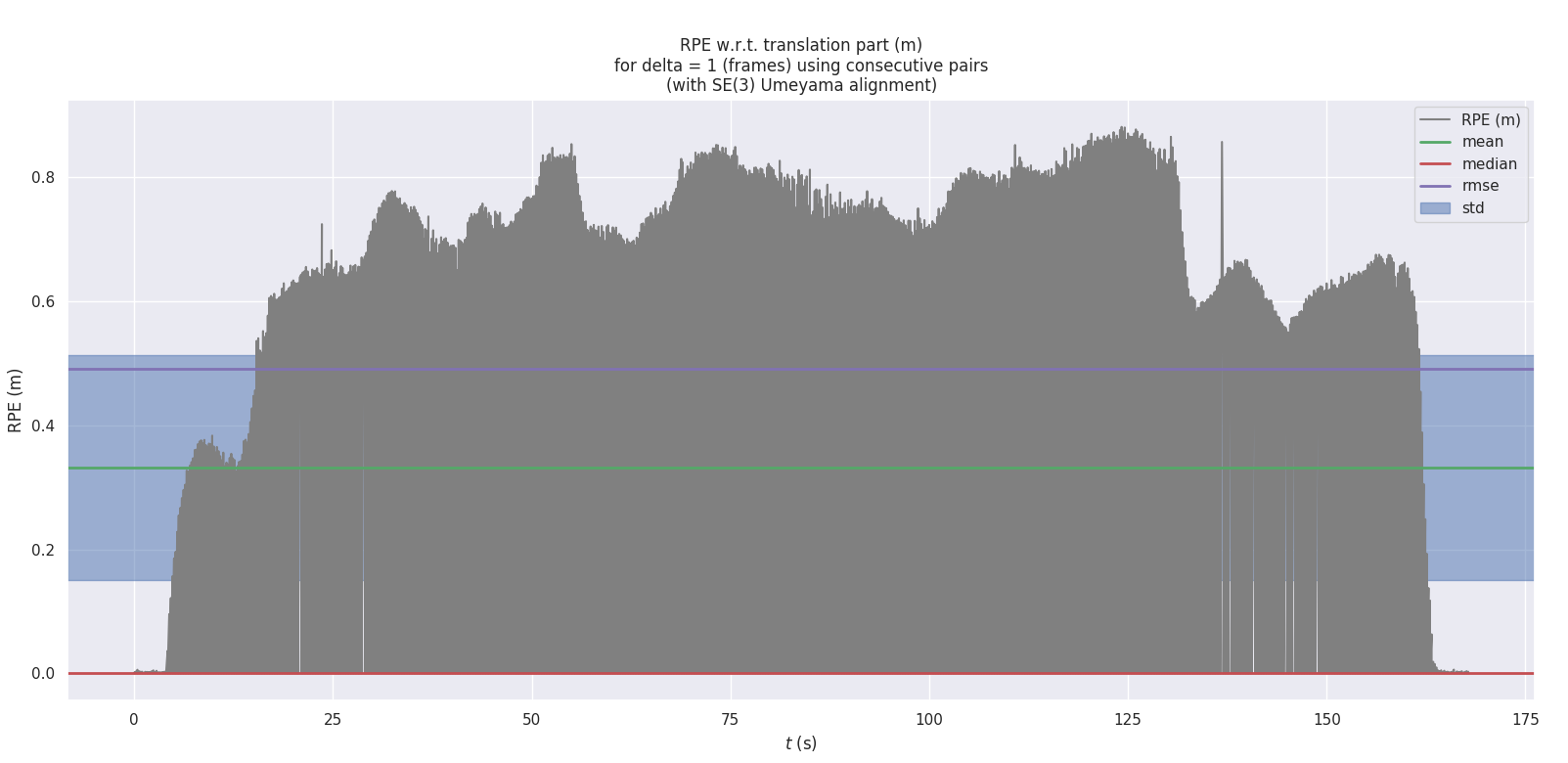
Hi, I'm trying to compare 2 odometries using EVO but I think I got a static offset between those 2 topics. I tried some options within the command line but I can't align. I can get the transform after the alignement and save it but the error seems too big.
Did someone try the same setup ?

You might have better luck opening an issue with EVO or looking through previous issues.
Thanks for the advice. After putting my question, I opened an issue indeed. Do you use it ?
Take a look at this paper it may help you: https://w3.onera.fr/copernic/sites/w3...
This is a more recent paper: https://arxiv.org/pdf/2009.05427.pdf