
"Unable to connect to move_group" when running another machine
I wanted to controll my RobotArm via Rviz, followed a tutorial and everything works fine.
In the end: I ran rviz on an external device with the Rosmaster sitting on the robot itself.
For testing purposes i used the intern Rosmaster and then to try it for "real" i got to connect to the Rosmaster of the Robot "export ROS_MASTER_URI = http: //hostname:11311")".
Everything is the same except that when i run the demo.launch on the "real" Rosmaster i got:
[ERROR] [1629309314.819565696]: Unable to connect to move_group action server 'move_group' within allotted time (30s)
I already checkt the connection: both machines are connected to the internet via eth0. Both can be pinged. They also can ping each other(Hostname and IP works) and both can get access to them via ssh(Hostname and IP works). The ROS_MASTER_URI is definitive the same. There is no time difference between the machines (same timezone). I've also checked the docs wiki/ROS/NetworkSetup and wiki/ROS/Tutorials/MultipleMachines.
That's it. Nothing more shows up or happens and i am not able to find something that helps. If you do have have any questions about my setup. I'll try to answer asap.
External Device (Virtual Machine):
- Ubuntu 16.04.7 LTS
- ROS PARAMETERS
- /rosdistro: kinetic
- /rosversion: 1.12.17
- Network connection: Bridged
Robot (Raspberry Pi 4 B):
- Ubuntu 16.04.7 LTS
- ROS PARAMETERS
- /rosdistro: kinetic
- /rosversion: 1.12.17
Thanks, Kiwi

Since you don't mention it: you've checked wiki/ROS/NetworkSetup and wiki/ROS/Tutorials/MultipleMachines?
yeah i've run threw this pages.
Ok. So that all worked? Without having to set
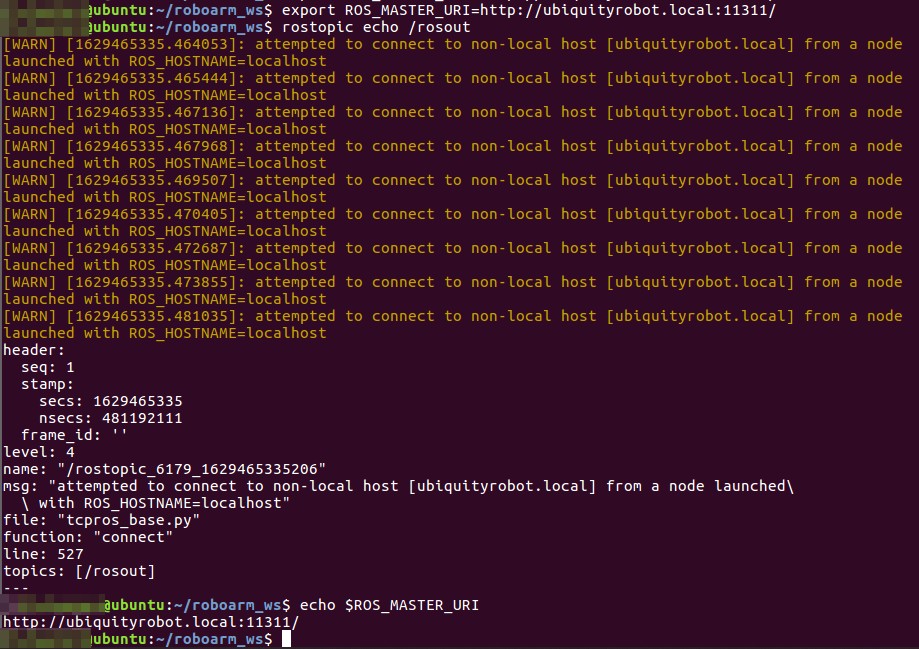
ROS_IPorROS_HOSTNAMEanywhere? Bi-directionalrostopic echoetc?I seems that connected finally because when i look at (rostopic echo /rosout) this comes up(definitive not what the host is showing): https://pasteboard.co/KgLu8Lo.png (image of /rosout on VM)
Right. So:
editbutton/link to edit)talkerandlistener), or runrostopic echo /chatteron the first host androstopic pub -r1 /chatter std_msgs/String 'ping'on the second. Then switch the roles (ie:pubon the second host, andechoon the first)Don't use random topics, and be very clear about what you're running where.
Additionally: please update your question with the values of
ROS_IP,ROS_HOSTNAMEandROS_MASTER_URIfor all involved hosts.Edit: I'm getting a feeling I understand why things don't work for you, but you should have run into that when doing the test (which you claim ...(more)
Ok, no matter which machine I run the pub or echo on, the listener does not receive anything. Also no error is showing up.
I've posted an answer.
You do agree with me that this problem should have shown up if you'd run the tests described on the wiki pages I linked in an earlier comment?
Yeah fully