
Error in running the robot_localization pkg
Hi everyone,
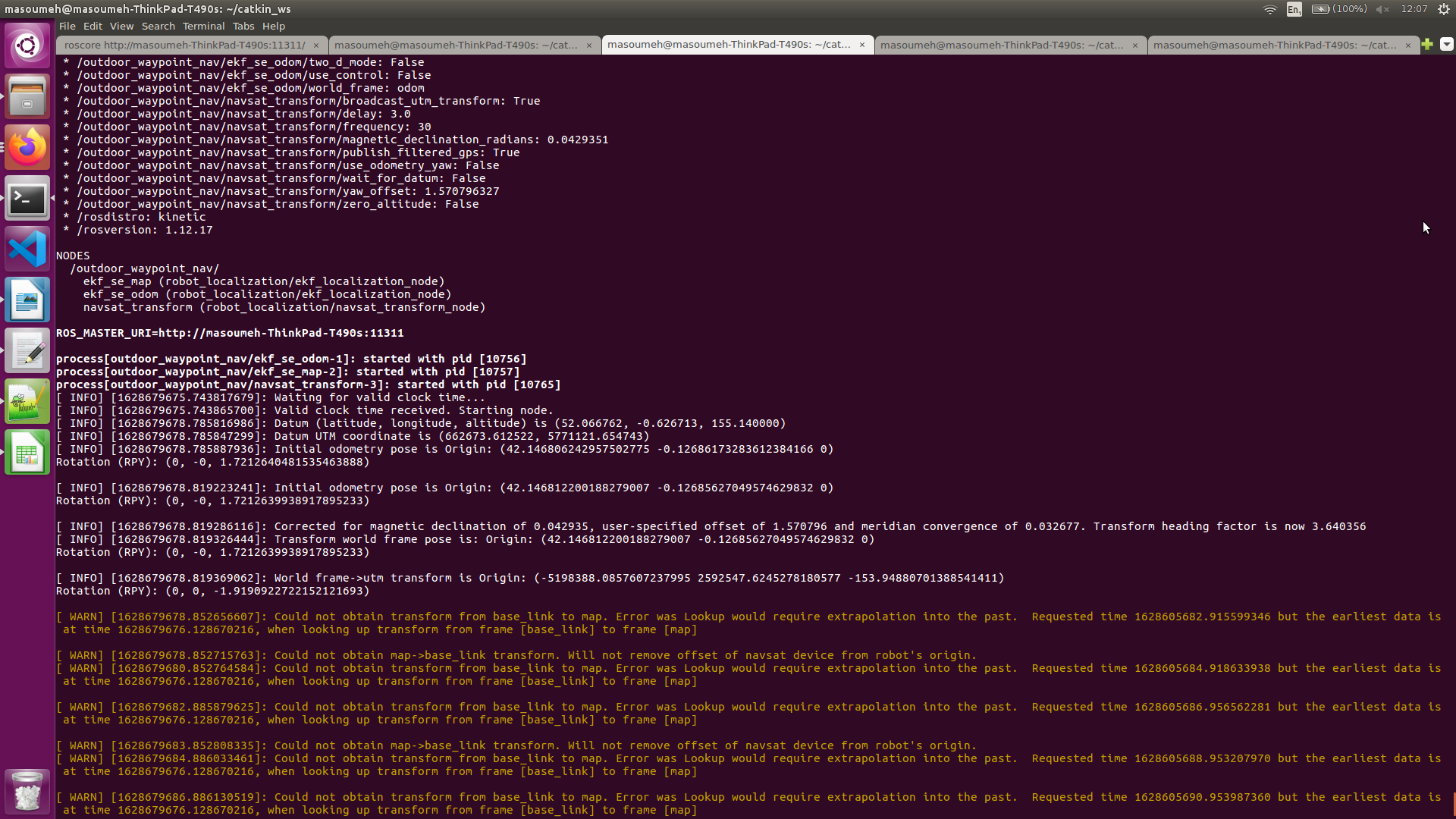
I want to use robot_localization pakages.So when i run the launch files which contain all three instances. it shows the attached error,:
..............................................................
and this is my navsat transorm parameters:
navsat_transform: frequency: 30
delay: 3.0
magnetic_declination_radians: 0.0429351
yaw_offset: 1.570796327
zero_altitude: false
broadcast_utm_transform: true
publish_filtered_gps: true
use_odometry_yaw: true
wait_for_datum: false ..................................................................................... I donot know how to set "magnetic_declination_radians" and "yaw_offset"
C:\fakepath\Error_related to navsat transform.png
FRAME:
Would you guide me that what does it mean?
Thanks Masoumeh

{kind=link}
{kind=link}
Seems like an error with your tf. Can you verify that a transform exists from base_link to map? Maybe post your tf tree as well here.
Also, are you using robot_localization real time on a robot or playing back from a bag?
Dear @ Akhil Kurup , thanks for your response, I run a bag file which contains a number of topics,if this works fine, in the next step i want to use rtabmap in order to provide map for robot_localization and object detection.
yeas, i have the tf between map and base_link (as well as base_link to map):
rosrun tf tf_echo /base_link /map
At time 1628605743.550
Translation: [-156.211, -271.306, -0.000]
Rotation: in Quaternion [0.000, 0.000, 0.951, -0.309] in RPY (radian) [0.000, -0.000, -2.513] in RPY (degree) [0.000, -0.000, -144.009]
Can you try setting the
use_sim_timeparameter to true before playing the bag?where is this parameter? how can I put it in true mode?
You can read about what it does here and how to use it in this question.
Dear Akhil,
I did as follows, but again I have that error:
1) set the use_sim_time parameter to true:
2) play the bag file with the argument --clock: