
Autoware car following issue using Open Planner
Hi all,
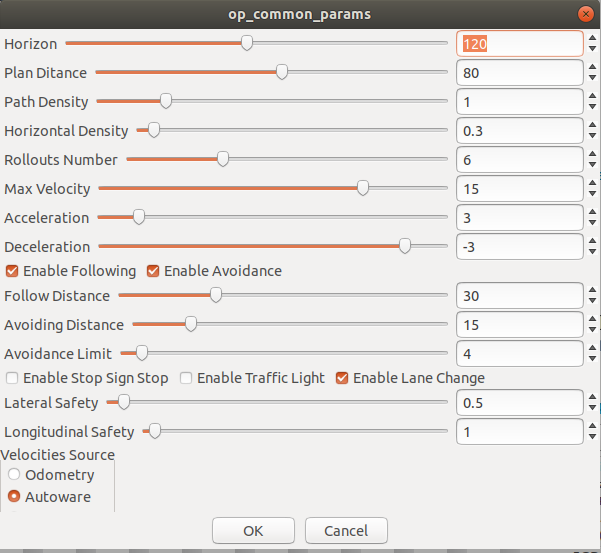
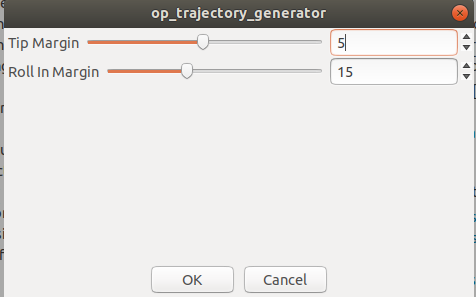
I am trying to do some field test using the Autoware 1.13 Release + Open Planner. I would like test the car following scenario. The leading vehicle is travelling at 3m/s. The ego-vehicle is controlled using the Autoware+open planner. The parameters used for local planning are as below:
The ego-vehicle did not try to maintain a safe car-following distance (I assume it will maintain a safe gap with the same velocity with the leading vehicle). Instead, It approached the leading vehicle and made a hard brake to a full stop. Here is a video showing the process (sorry for the low resolution).
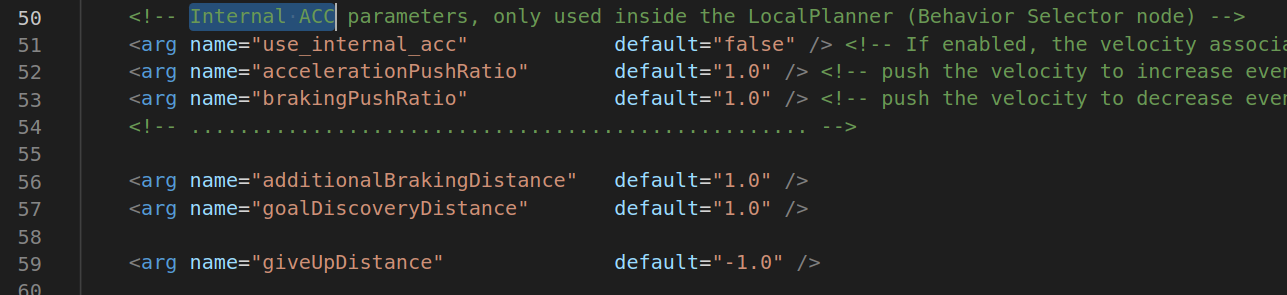
I am using default values for Internal ACC parameters as shown below:
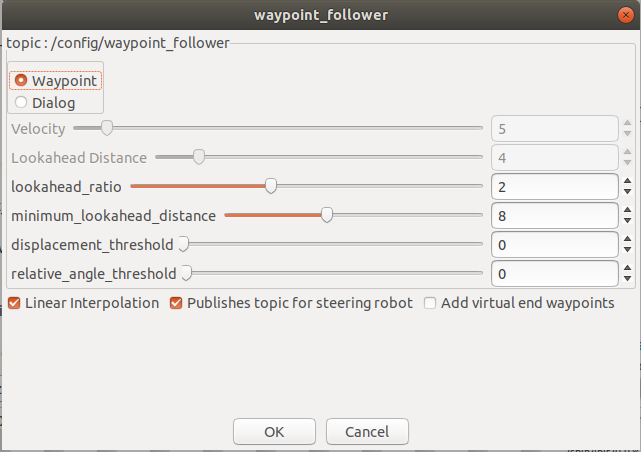
And yes I am using pure pursuit to track the trajectory, the parameters used for pure pursuit are as below:
Is this caused by improper setting of some parameters? Any comments and suggestions are appreciated. Thanks!

Hi @Hatem, could you please take a look on this? Thanks :)!
what is the value of "enableinternalACC" parameter?
what controller are you using? pure pursuit ?
Hi @Hatem, I did not find the "enableinternalACC" parameter in the code (Am I using the right version of the open planner for Autoware 1.13 release?). But I find the "use_internal_acc" parameter and it is set as False. I have uploaded the screenshot of parameters regarding to Internal ACC parameters in the main content (it seems I cannot upload figures in the comment).
And yes, I am using pure pursuit to track the trajectory and the parameters used in pure pursuit is uploaded above.
Thanks :)
Hi Hatem,
The line 627 and 657 in the file common/op_planner/src/DecisionMaker.cpp (I am using the branch openplanner.1.13 seems should be commented out? Is these two lines causing problems? The two lines of code are: desiredVelocity = 0; //for CARLA