
Autoware.Ai Perception Failure: Agent not detected in Rviz [closed]

Hi
I am simulating an evasive maneuver in Autoware.AI (ROS1 based) with SVL simulator.
For some reason the pedestrian is not avoided by the car. I am not sure where the problem is. If is on:
1 - Detect the pedestrian ?
2 - “Spawn” the pedestrian on rviz map ?
3 - Motion planner algorithm ?
4 - Sensor Issue caused by SVL simulator side to detect the pedestrian ?
I have recorded short videos of the car colliding with this agent. They are available in youtube:
https://www.youtube.com/watch?v=6uddG...
As you can check the camera in rviz received the data. (The laser scan I am not sure, because the pedestrian does not appear to Point Cloud, right?)
Besides that I put a bigger agent, a car, to figure out if rviz detects it. For my surprise it detected, and the car’s shape is drawed in pink. However there is an issue with the map in perception module:
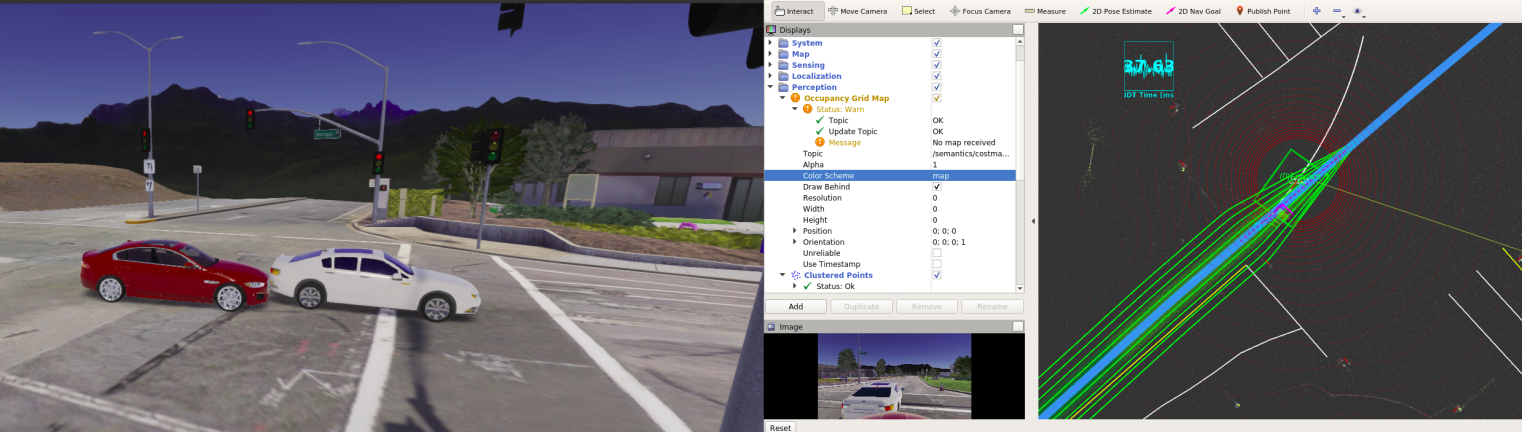
it says “no map received”
From the nav course I am aware that the previous map is required, in this case, the map of BorregasAve city was dowloaded. And I know that the sensors should update the map with new info about obstacles that appear over the old map….then I did not find out why this map is not updated. Some hint?
I believe I am facing a similar issue as this one: https://answers.ros.org/question/3670...
Someone had similar issue in detect and avoid SVL simulator Agents with the ego.vehicle? How to spawn this agent on rviz map, to enable ROS detect this obstacle?
Thanks in advance.
