
Custom model slam mapping issues
I've had problems creating a well formed map of a city simulation for weeks. Initially, I was using gmapping and I later switched to hector mapping. In both cases the resulting maps were misaligned as shown in the images below:
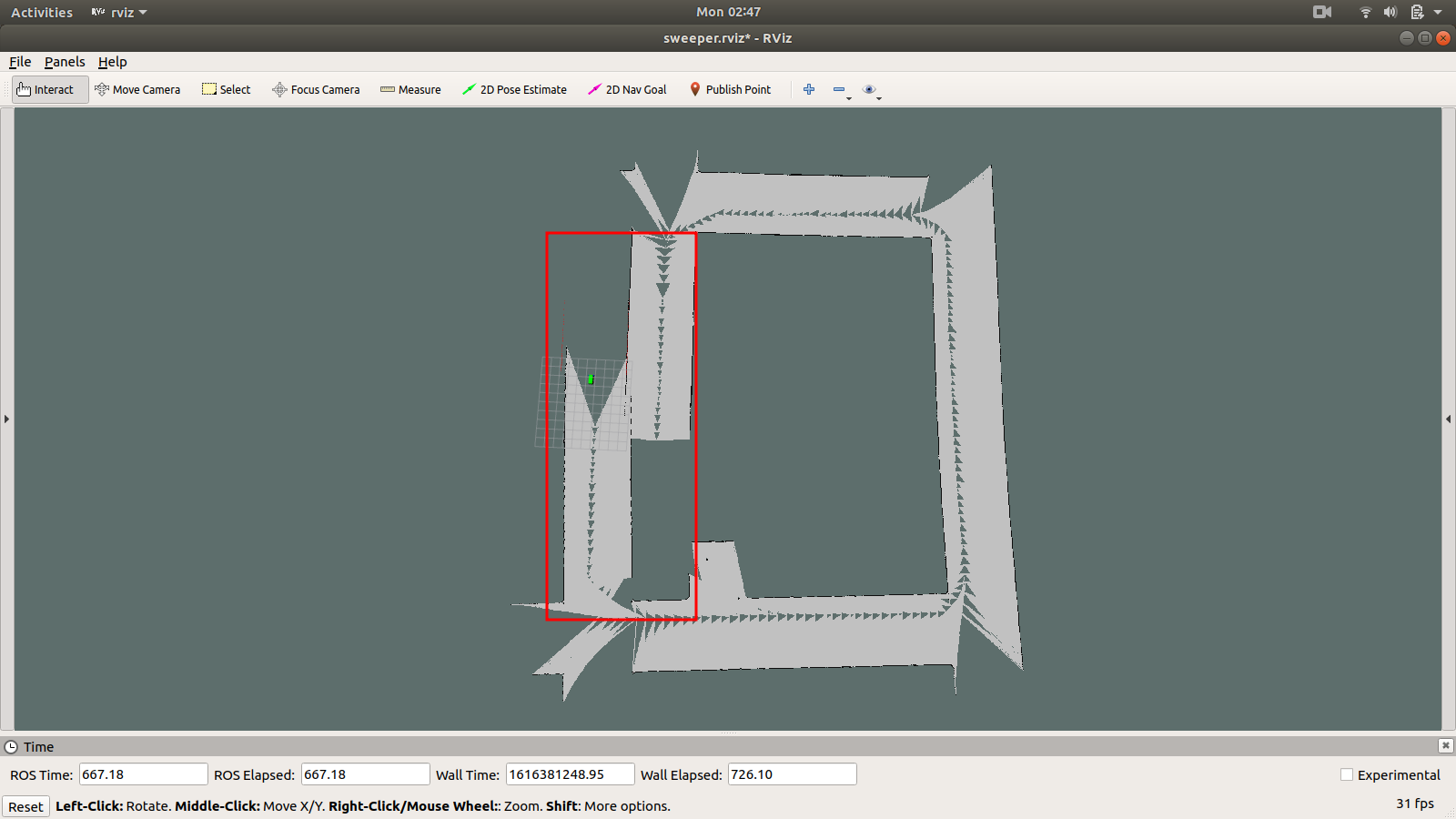
GMapping:
Hector Mapping:
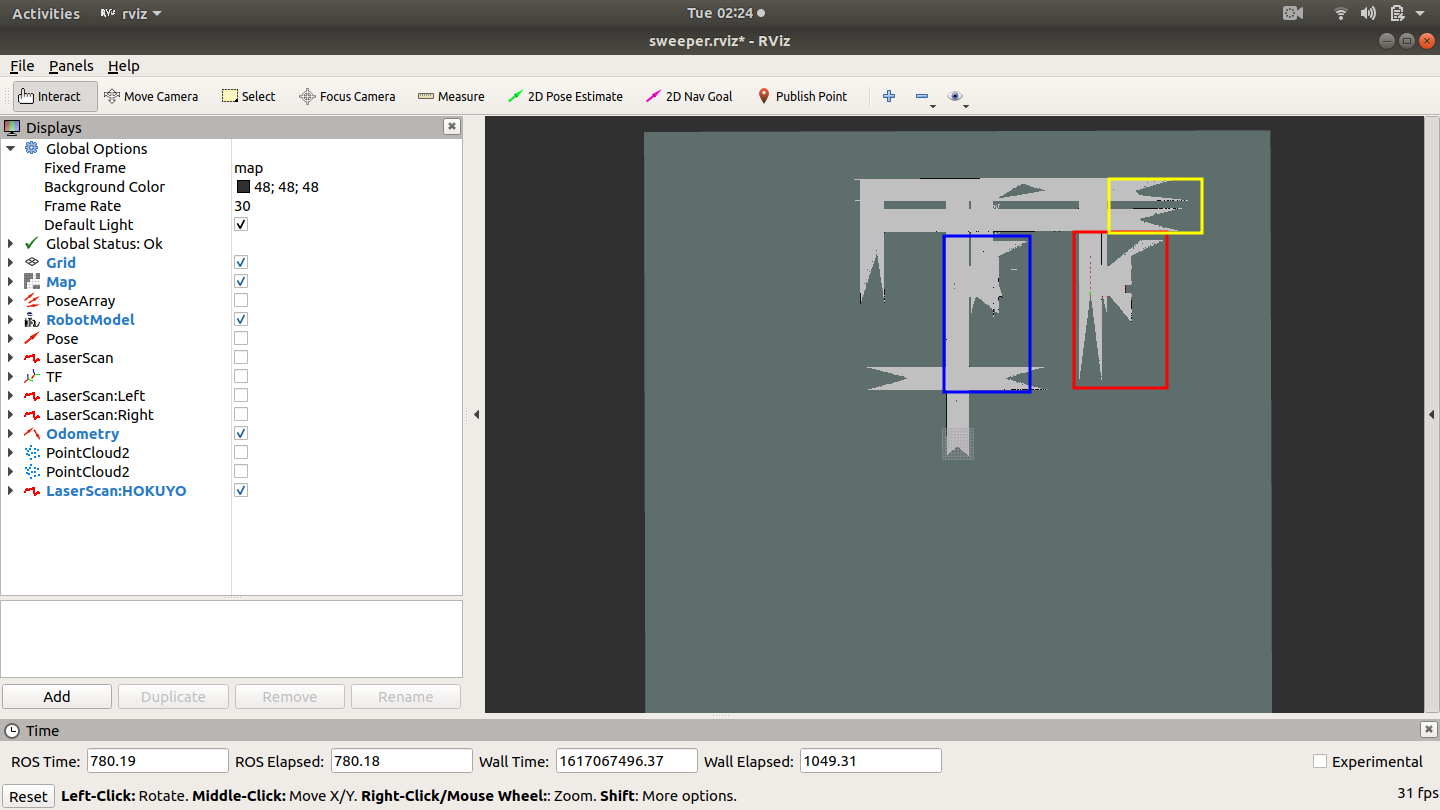
The highlighted areas of both maps indicate areas that are misaligned during the mapping process.
Because both cases result in similar issues, I was wondering if the problem might be with my xacro file ?
Is this something that can be resolved with costmap configuration files ( which I currently don't have ) OR is a basic but well formed URDF sufficient to correctly map an environment ?
add a comment
