
Autoware: tf error in running my own bag
when i do localizing using ndt_matching of autoware with my own bag and my own pcd map ,it shows error in rviz
"For frame [velodyne]: No transform to fixed frame [world]. TF error: [Lookup would require extrapolation into the past. Requested time 946656470.100994000 but the earliest data is at time 1602922640.067762767, when looking up transform from frame [velodyne] to frame [world]]"
however,when i use the demo bag file it seems work well.considering the big difference between the old and new tf data time it isn't be caught by tf cached delay.i use rqt_tf_tree to observe the difference of tf run by my bag and the demo.it is showed below 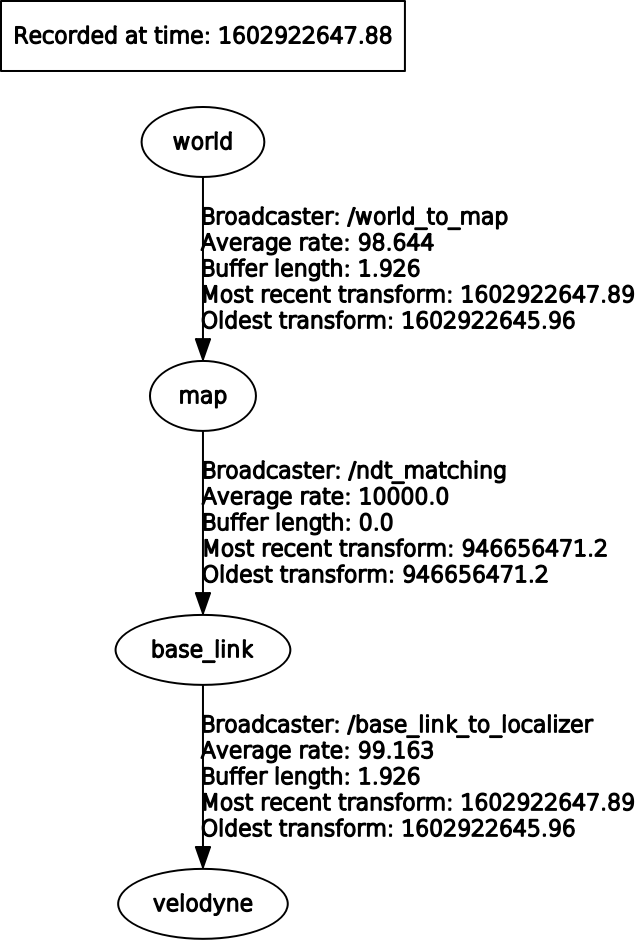 i am sured that all operations are the same between bags,even the pcd maps are the same ,but strangely all my own bags doesn't wowrks.how can i solve this,i think it has something to do with the ros time.
i am sured that all operations are the same between bags,even the pcd maps are the same ,but strangely all my own bags doesn't wowrks.how can i solve this,i think it has something to do with the ros time.
