ROS amcl package: Interpretation of the abbreviation "AMCL"
Hello everyone, I am currently working on the theoretical background of Monte Carlo localization. In this context I have a question regarding the general interpretation of the abbreviation "AMCL". According to amcl ROS wiki: (http://wiki.ros.org/amcl)
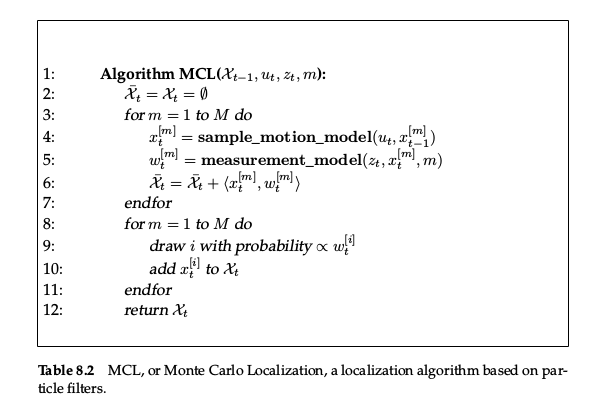
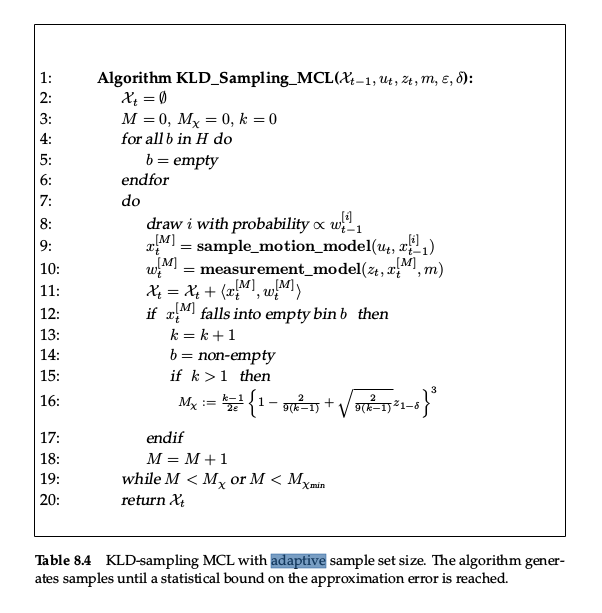
“amcl is a probabilistic localization system for a robot moving in 2D. It implements the adaptive (or KLD-sampling) Monte Carlo localization approach (as described by Dieter Fox), which uses a particle filter to track the pose of a robot against a known map.”
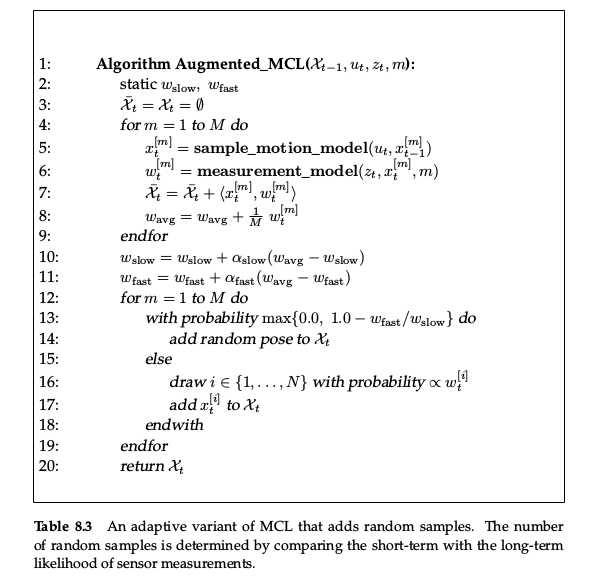
In this context, the "A" can be understood as "adaptive" in the context of the adaptive change of the number of particles according to the complexity of the belief (adapting the size of particle sets). However, according to further information according to the ROS wiki page, the AMCL package also implements the "Augmented_MCL" algorithm. Augmented_MCL is designed to adapt the number of a randomly generated particles (keyword: recovery from global localization errors).
The AMCL package thus corresponds to a combination of KLD-Sampling-MCL and Augmendetd-MCL. The "A" in "AMCL" thus describes the adaptation of the total number of particles (KLD-Sampling) as well as the adaptation of the randomly generated particles (Augmented-MCL).
Are my previous assumptions correct? Thanks for your feedback!