
PWM ardrone_autonomy

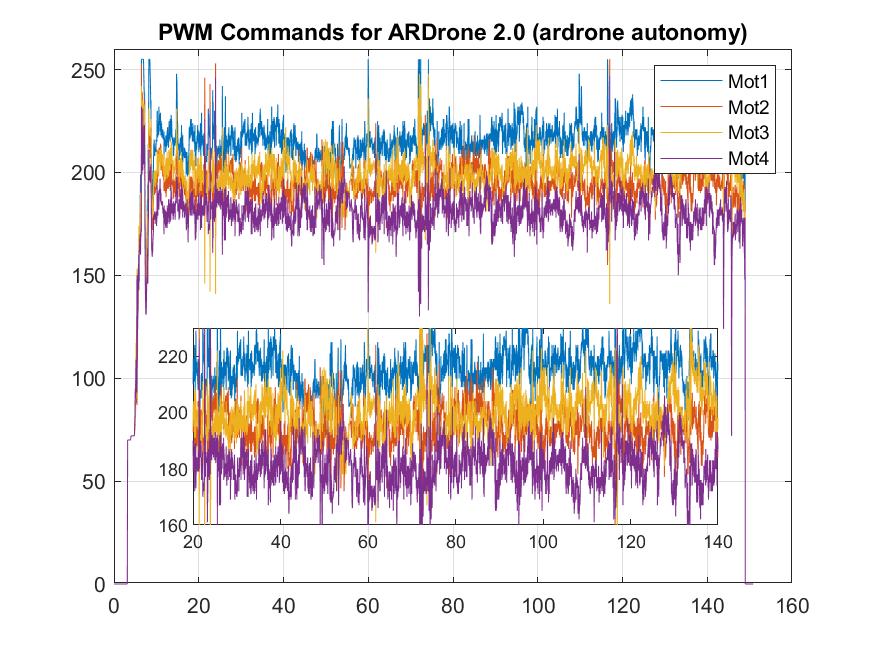
Hello All, I am using the ARDrone 2.0 (with [ardrone_autonomy] driver) in ROS for my project. I have a question or a concern about the PWM signals commands to the motors. I flew the drone in a hover mode where I expect the PWM signals going to the motors to be almost the same. But, when I plot them, they have a shift in their magnitude (i.e. PWM1 oscillating around 220, PWM2,3 around 200 while PWM 4 around 180) see the figure below. Do you have any clarification about this?
add a comment
