Attention: Answers.ros.org is deprecated as of August the 11th, 2023. Please visit robotics.stackexchange.com to ask a new question. This site will remain online in read-only mode during the transition and into the foreseeable future. Selected questions and answers have been migrated, and redirects have been put in place to direct users to the corresponding questions on Robotics Stack Exchange. Additional details are available here.
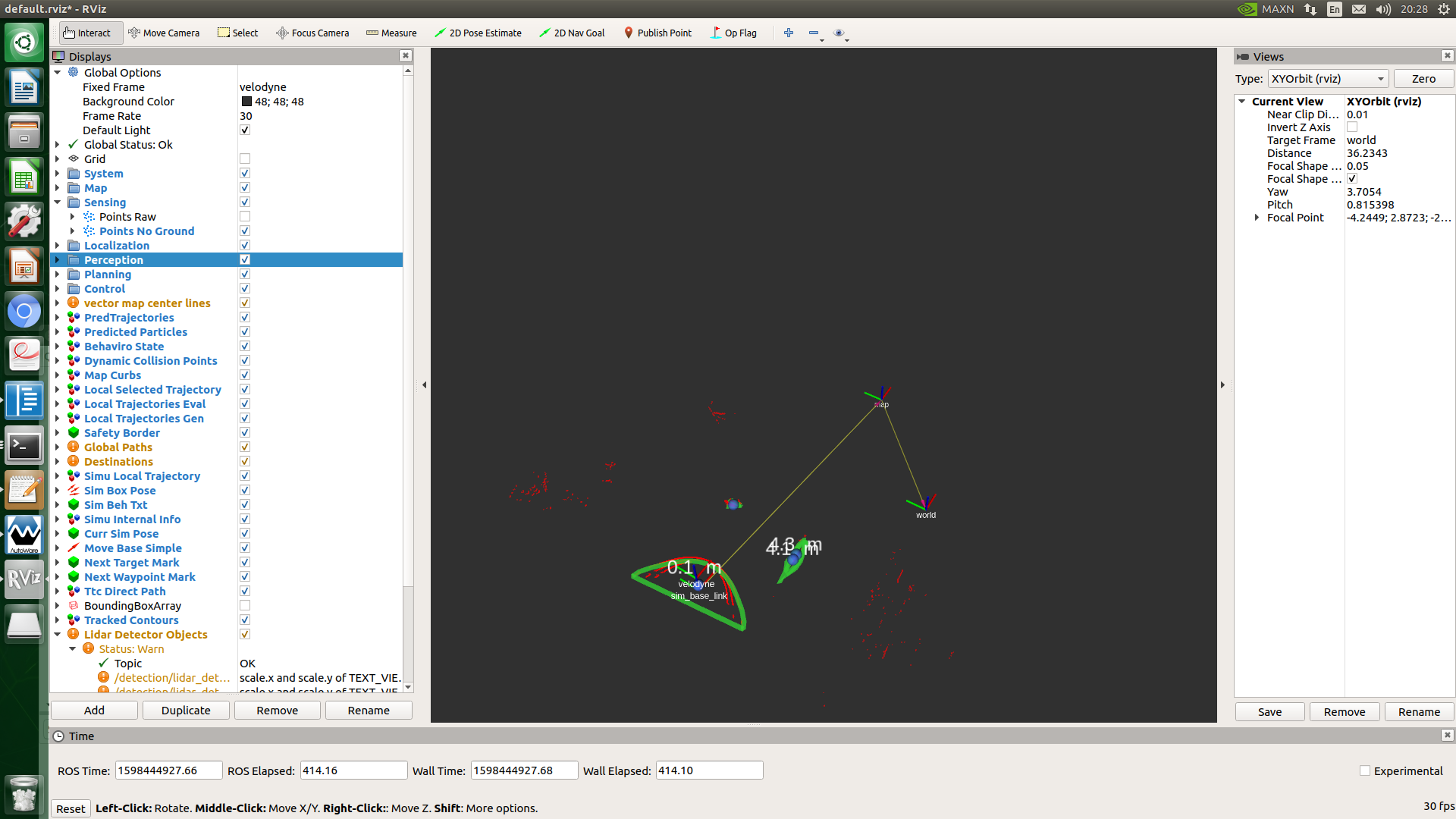
I want to set a simulated obstacle on the global path to check the open planner's obstacle avoidance.
Normal way is publish point,but my rviz will break down,I.search Google find autoware has an Op Flag also has an obstacle function.
I tried dp planner and the Op Flag shows as an obstacle,then the wf_simualtor bypass the Op Flag when using pure_pursuit , but when I tried op planner,the Op Flag didn't show as an obstacle when I clicked mouse.
Anyway,I just want to verify op planner's obstacle avoidance,do you have a better idea?I have a real car and can implement lidar detection with euclidean cluster and kf_contor_track.
please use OpenPlanent 1.5 (op_global_planner, op_local_planner)
you will find everything you need in this tutorial
you can setup a simulated vehicle (set its velocity to 0 if you want it to work as static obstacle)
in the autoware 1.3, 1.14 only one op_car_simulator is shown in the runtime manage, but you can still run other op_car_simulator from the command line.
if you want to just insert one point by mouse,
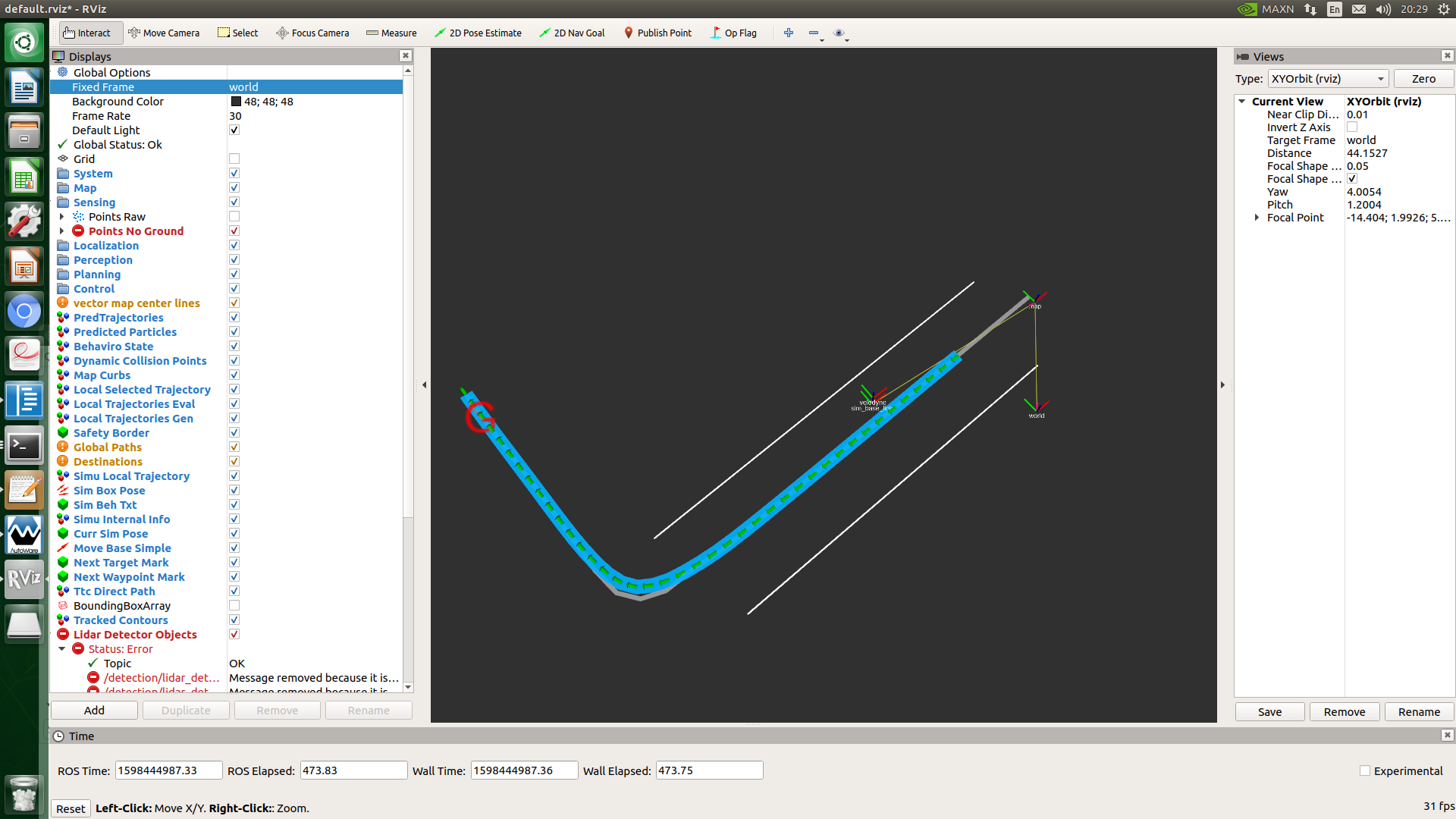
I fixed the issue of rviz crashing by using 2D Nav Goal. but this solution is available only in my fork which I mentioned in my answer.
@Hatem We are also attempting to get the lidar detected objects to be avoided when using OpenPlanner. We are currently using the 1.13 branch that you have created. We can see the detected objects on the map but wf_simulator/pure_pursuit seem to just ignore them. We are using kf_contour_track and have turned off enable openplanner perception simulation. We are using the range_vision_fusion node for sensor fusion as well. What would you suggest for us to try?



@Hatem Hi,can you help me with that problem?May be easy for you:)