
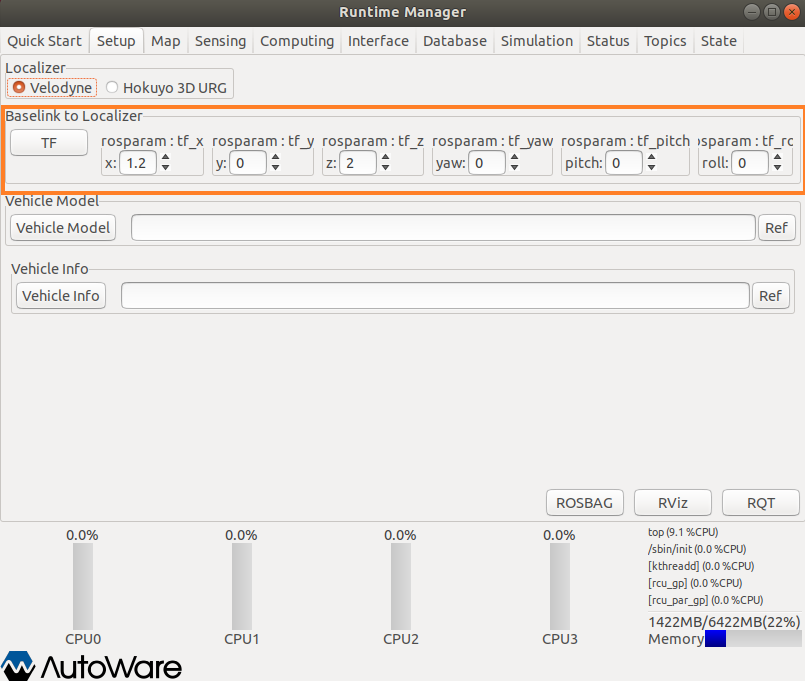
how to set parameters in ndt_mapping while my velodyne is slant to create 3D Map
I want to generate 3D point cloud map in my campus,and my velodyne_16 is fixed to the car at a certain Angle,how can I set the parameters in ndt_mapping to genrate a better map.
add a comment
 .
.