
How to set robot position [amcl_pose (x,y)] in rviz to (0.0000,0.00000) on top left corner (User defined anywhere)?
I have created a small map in the gazebo, after launching the gazebo, RVIZ, and map server the robot is loading in the middle of the map, and (x,y) position is (0.00000,0.00000) as shown in the image.
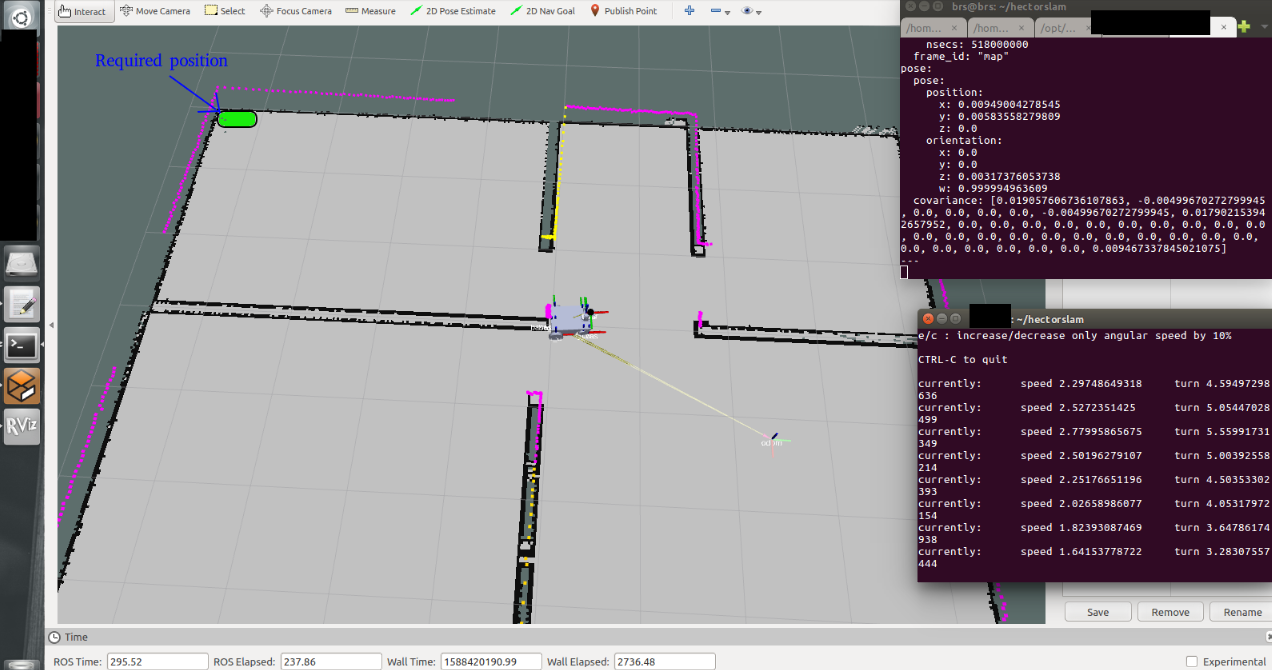
I want to load the robot at the top-left corner of the map the position of that coordinate should be (0.00000,0.00000). How can I achieve this?
add a comment
