
DWA invalid trajectory with negative cost for an in-place rotation
Hello,
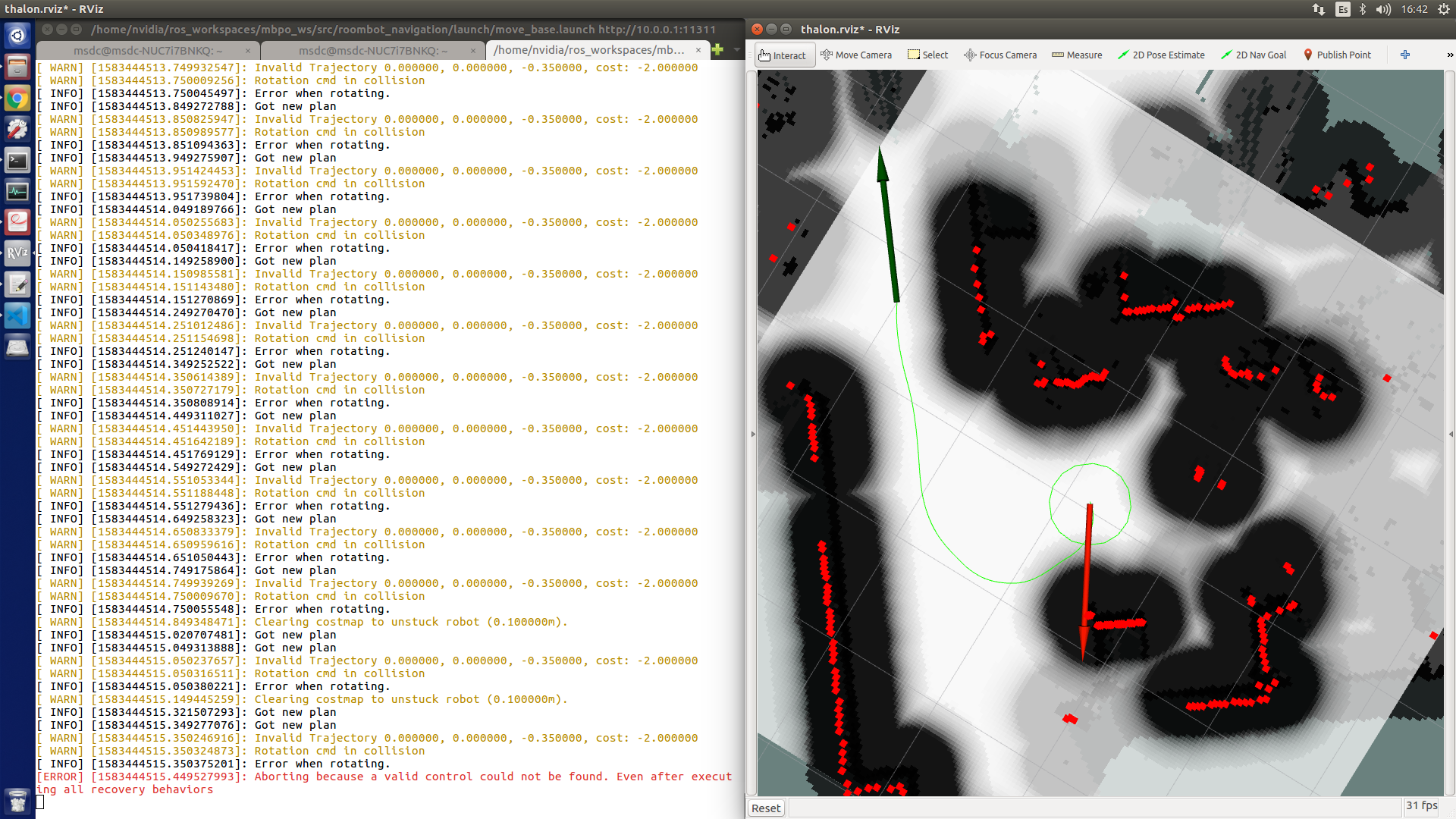
I am using dwa_planner for moving my robot and usually it works well. Nevertheless, sometimes the robot is not capable of executing a trajectory and it shows an invalid trajectory message with cost -2.000 from checkTrajectory. I realized this behavior only appears when the first movement in trajectory is an in-place rotation.
It is, when the error appears (even after calling a clear costmap service and visually checking the robot is not in collision), if I send a rotation target the robot doesn't move, but if I send a linear target the robot moves and then it is capable of executing any kind of trajectory (in-place rotation or a complex trajectory), until eventually the error appears again.
How could I solve this issue?
add a comment
