
pointcloud_to_laserscan spatial offset
Hello
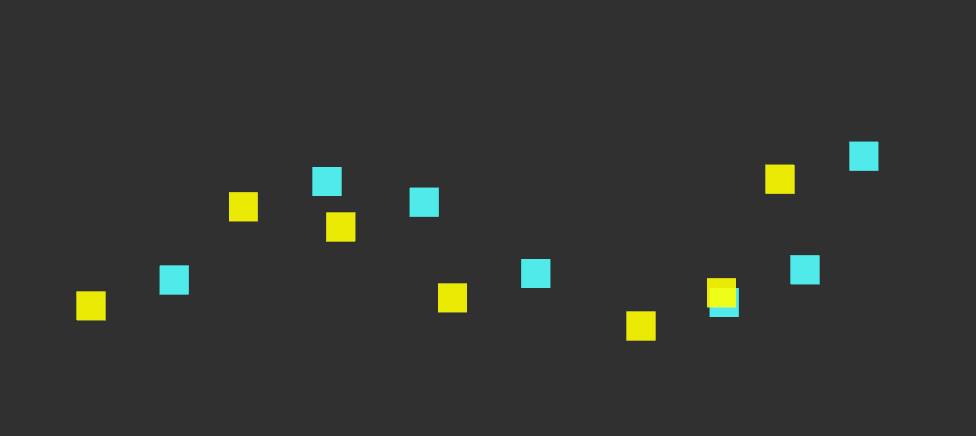
I'm using pointcloud_to_laserscan to convert a pointcloud to laserscan, however, the result is spatially offset when comparing with the input cloud.
Anyone else experienced this or has any idea on what could be causing this?
Yellow is input cloud, blue is output scan.
<node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan" output="screen">
<remap from="cloud_in" to="/input_pcl"/>
<remap from="scan" to="/output_scan"/>
<param name="angle_min" value="-3.1400001049"/>
<param name="angle_max" value="3.1400001049"/>
<param name="scan_time" value=" 0.0250000003725"/>
<param name="range_min" value="0.0"/>
<param name="range_max" value="30.0"/>
<param name="angle_increment" value="0.00436332312"/>
<param name="use_inf" value="false"/>
</node>

Please attach the image directly to your question. I've given you sufficient karma for that.
Thank you. Updated.