
publish whole point cloud
Hey there,
I would like to build a 3D pointcloud using a realsense camera which is mounted on a robot. I want to record the current point cloud of the camera and stack it to a whole point cloud of the room and publish this point cloud as well.
For my understanding I have to transform each of these current point clouds which are recorded in the frame_id of the realsense_camera to a global frame or?
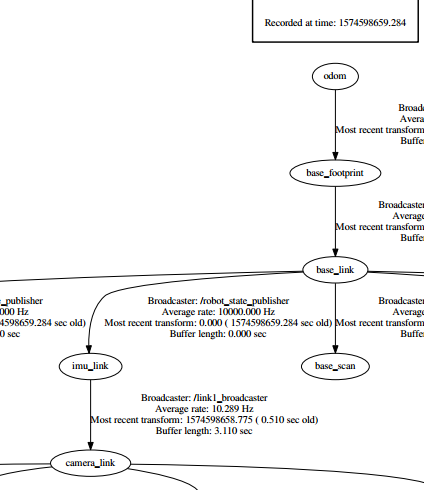
I currently do not know how I should transform these current point clouds. This is my \tf tree:
This is how I transform my pointclouds:
transform = tf_buffer.lookup_transform("camera_link", "odom", rospy.Time(0), rospy.Duration(2.0))
But its not working.... Do I have to transform at all? I am a little bit lost here....
add a comment
