Before integrating with AMCL I would suggest to take a look at section 1 on the Navigation Stack Troubleshooting page, this will make sure that you are estimating the odometry correctly:
- Is My Odometry Good Enough for AMCL Problem: The robot doesn't seem to be
localized properly. Its position
estimate jumps around a lot in rviz
and the navigation stack doesn't seem
able to follow the plans produced by
the global planner. Is this a problem
with AMCL or my robot's odometry.
Solution: There are a couple of tests
that are helpful to run to see how
good the odometry of a robot is:
Test 1: Open up rviz and make sure
that you're subscribed to the laser
scan topic for your robot. Next, set
the decay time to something like 30
seconds. Also set the fixed frame to
the odom frame. Perform an in-place
rotation with the robot and look at
the laser scans. If odometry is fairly
accurate, you should see scans from
the previous rotation overlap with
those generated on the current
rotation. You'll want to do this in an
area where you have distinctive
features in your laser scan.
Test 2:Set up rviz the same way as the
previous test. Point the robot at a
wall and drive it towards it. With
good odometry, the wall should stay in
about the same place as the robot
moves towards it. If you see a lot of
movement in the positions of the scans
relative to the wall that means
odometry is poor.
Test 3: Drive the robot straight down
a hallway. The laser scans of the
hallway should stay straight. If you
see them move a lot, it means your
odometry is poor.



Are you sure you have your robot otherwise set up correctly?
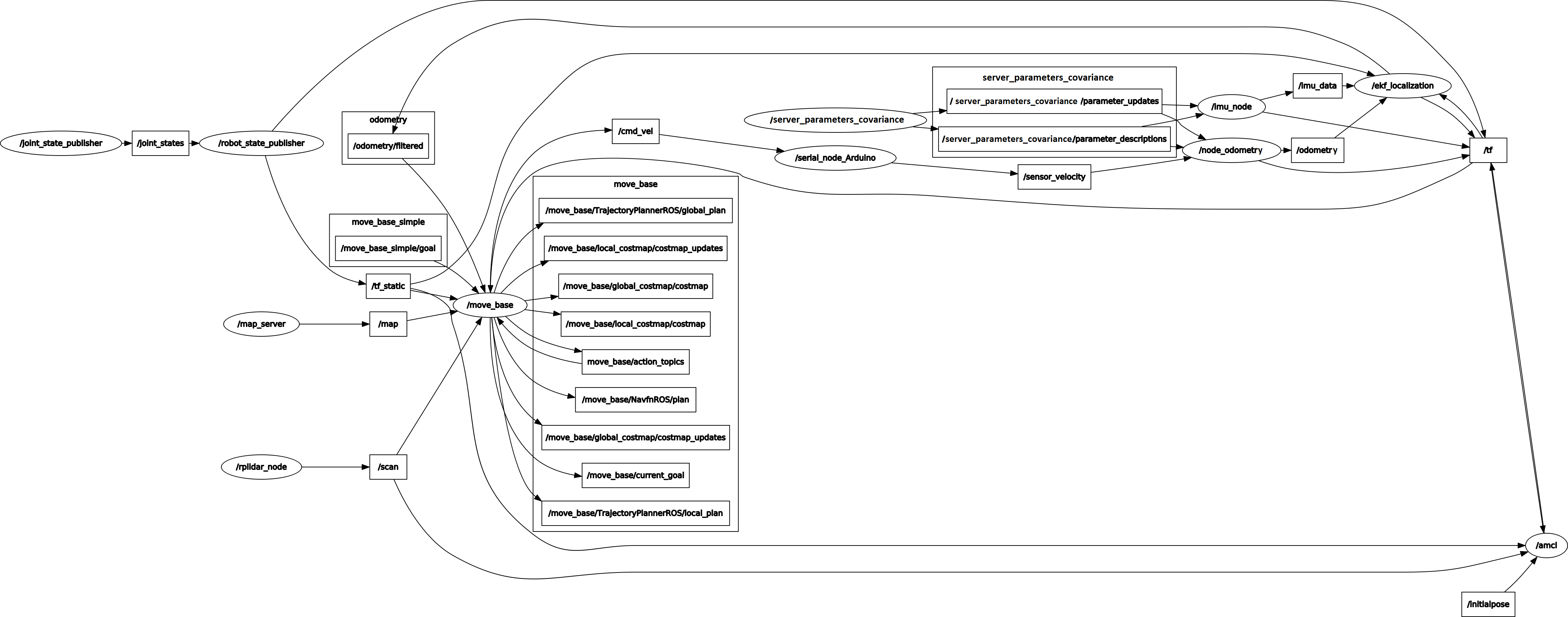
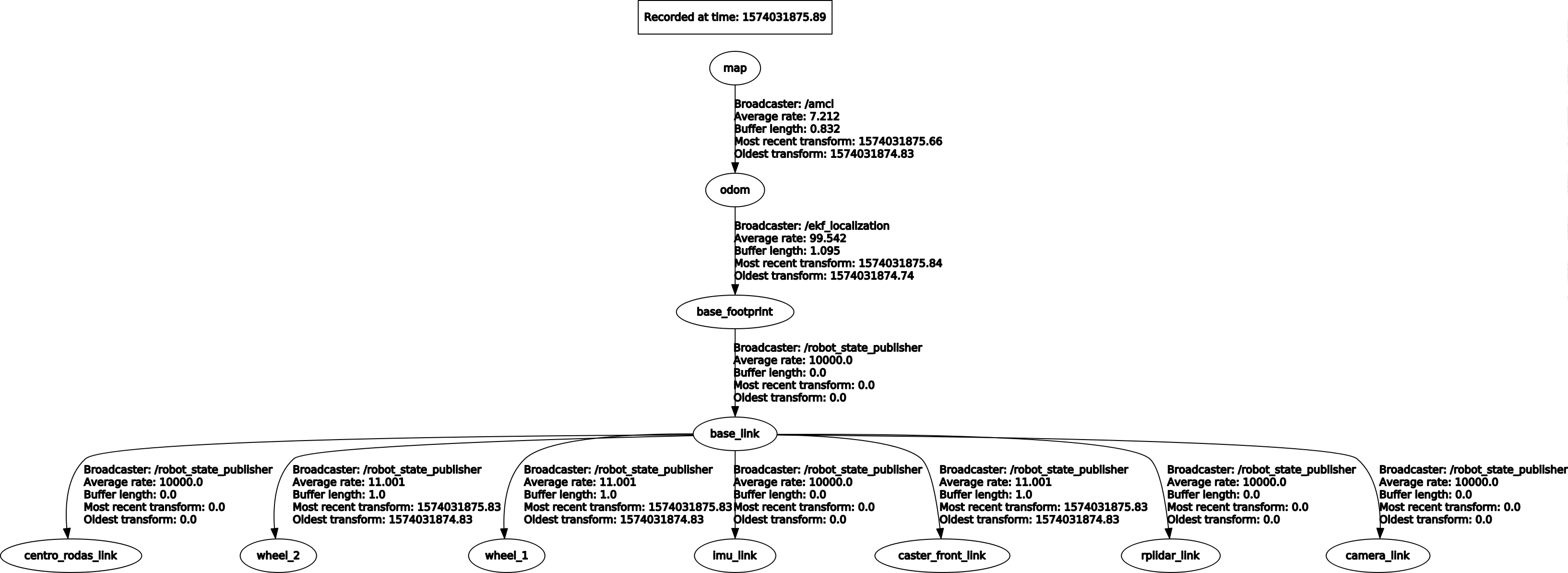
Thanks for your time. If that helps, I added some images from "rqt_graph / rqt_tf_tree". Do not hesitate to ask me for more information, I am learning ROS and I have many doubts