
Change transform of RViz MoveIt InteractiveMarker at runtime
I have a robot manipulator with a gripper attached at flange, tool zero frame tool0 and two user eefs named eef_fish_fingers and eef_simple_grip.
In MoveIt this the interactive marker is per default visualized at the tool_tip frame which I set to tool0 for now. To improve the user experience, I want to be able to change this frame at runtime, so that the user effectively can switch between the eefs and tool0.
Is there a way to modify the tool_tip link in the RViz visualization or to modify the transform between the configured tool_tip link (I would introduce a tool_visual link) and the robots flange link?
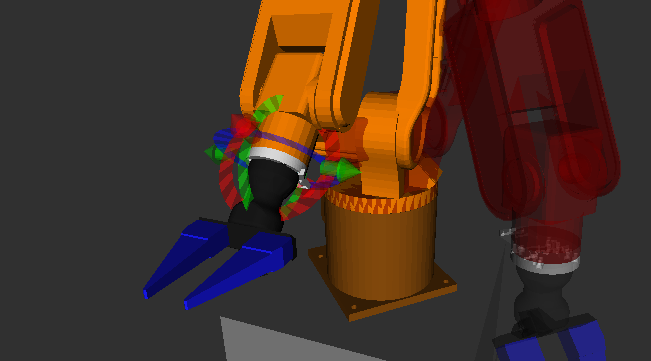
Here is how the RViz visual looks like with tool0 selected.
Snippet from the SRDF
<group name="manipulator">
<chain base_link="borunte_stand_link" tip_link="tool0" />
</group>
Related question: https://answers.ros.org/question/3361...
add a comment
