
Other APIs for ROS
We're looking into ways to make "training-wheels" for ROS. Before you get mad, hear me out. We have active ROS projects on TurtleBots and more in our Robotics Lab. We have computer science grad students working and being effective.
However I am interested in making those robots available to other disciplines or departments. Psychology, anthropology, theatre arts, cognitive science all have ideas on how they could incorporate Robotics into their research or curriculum. But these are not engineers or computer scientists.
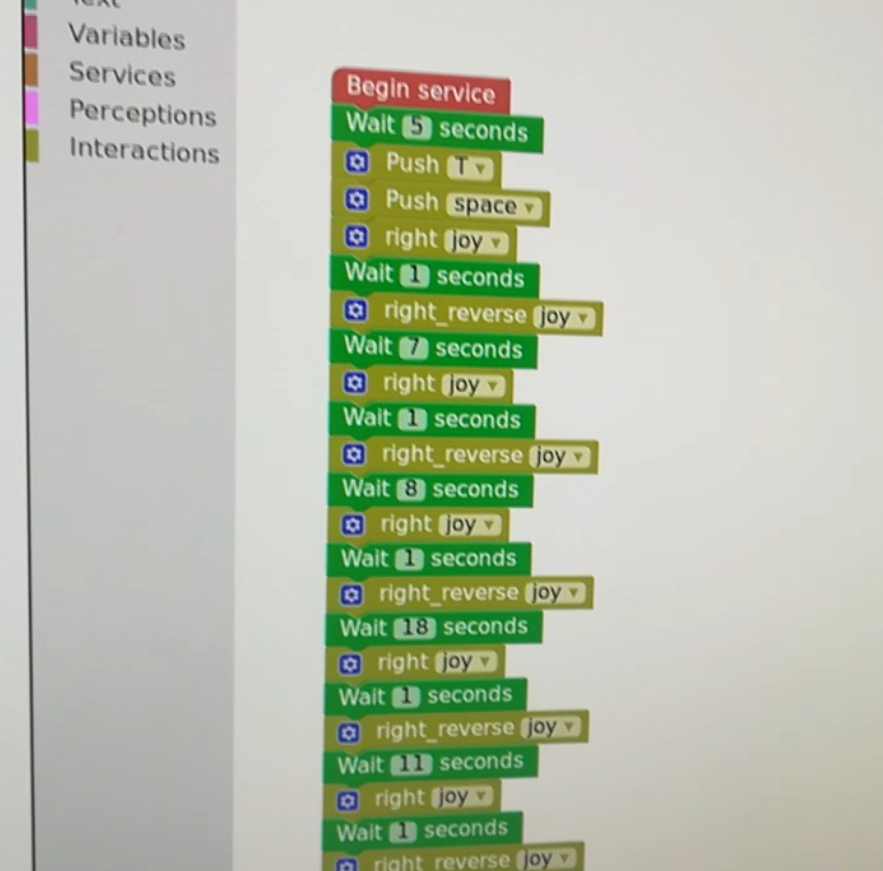
I believe that we're not the first to see this need: to allow beginning or non-programmers to write simple programs for the robots. It could be a "blocks" programming interface, a different language, or just a simplified python binding with higher level abstractions, simplified concepts, probably more limited flexibility, but a simpler "hello world" experience.
Possible responses and my comment: 1) "Why don't they just use simple arduino robots for that?" Because we happen to have a fully equipped and growing robotics lab that is ROS based. 2) "Programming robots is hard. You can't dumb it down." I beg to differ. If you're willing to forgo some power and flexibility you should be able to get a simpler experience 3) "Just google" I googled quite a bit and wasn't able to find something that seemed to match.
Thanks!



{kind=link}
Is this connected to #q325733? Can you tell us what happened after you asked that question?