
stereo_image_proc does not generate pointcloud
I am trying to use stereo_image_proc with a realsense T265 camera in order to get a pointcloud from it.
According with documentation here, I verified that after running realsense driver the following messages are published (and images are properly displayed):
/camera/fisheye1/image_raw
/camera/fisheye1/camera_info
/camera/fisheye2/image_raw
/camera/fisheye2/camera_info
Then I run stereo_image_proc node with using a launch file as follow:
<launch>
<remap from="/camera/left/image_raw" to="/camera/fisheye1/image_raw"/>
<remap from="/camera/left/camera_info" to="/camera/fisheye1/camera_info"/>
<remap from="/camera/right/image_raw" to="/camera/fisheye2/image_raw"/>
<remap from="/camera/right/camera_info" to="/camera/fisheye2/camera_info"/>
<group ns='camera'>
<node name="stereo_image_proc" pkg="stereo_image_proc" type="stereo_image_proc" output='screen'/>
</group>
</launch>
I don't get any error, but rviz doesn't show the pointcloud (only a point in zero appears).

A rostopic echo /camera/points2 command shows data as below:
[..., 192, 127, 0, 0, 192, 127, 0, 0, 192, 127, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 192, 127, 0, 0, 192, 127, 0, 0, 192, 127, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 192, 127, 0, 0, 192, 127, 0, 0, 192, 127, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, ...]
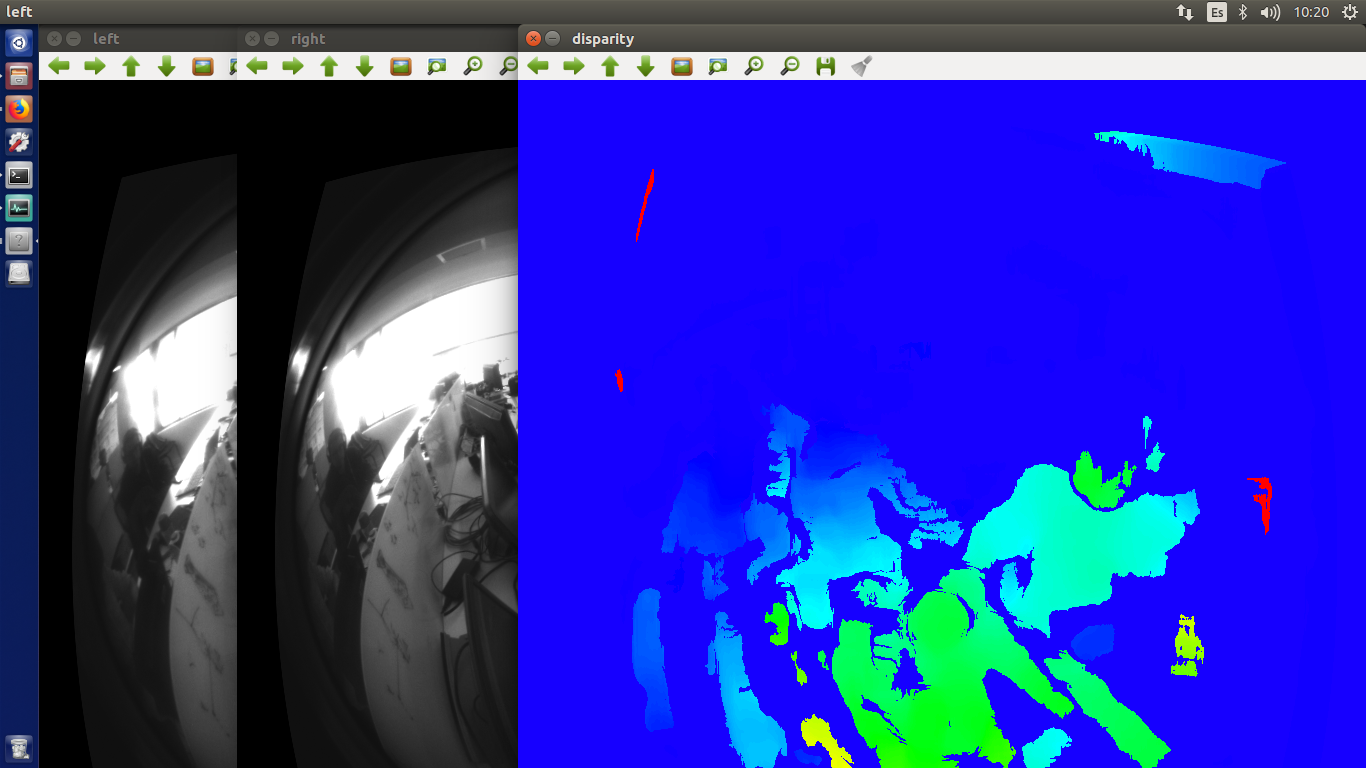
And if I run rosrun image_view stereo_view stereo:=/camera image:=image_rect_color, everything seems to work well.
Am I missing anything else in order to get the pointcloud?

Possibly related to this old issue in
ros-perception/image_pipeline: https://github.com/ros-perception/ima...are you able to solve this issue?
Does this answer help?