
Laser Scan walls moving with robot
In years past I was able to make maps with gmapping. Lately I cannot anymore. I've spent some months trying to tweak calibration and such to no avail.
This is a setup similar to a Turtlebot, using an Asus Xtion Pro as a fake "Laser Scanner", which should be functionally the same as a Kinect.
This is the problem:
- Run rviz
- Set the Global Options->Fixed Frame to "odom"
- Set the Kinect Camera "Decay Time" to something high.
- Rotate the robot.
In the past I once got a reasonable view of the room.
Now I get this:
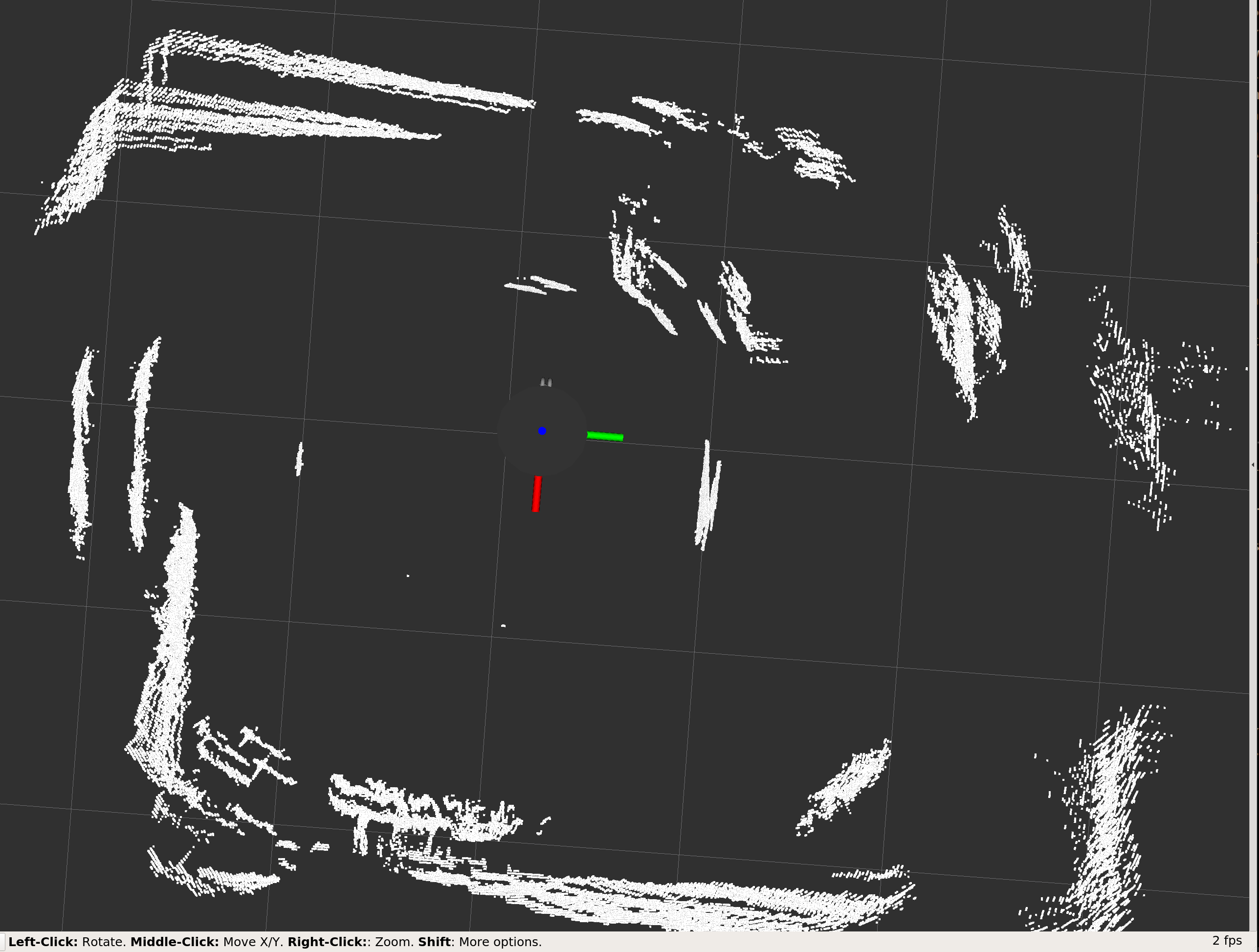
The walls appear to rotate WITH the robot. this makes a mess of any attempt to create a map, as gmapping interprets this as seen, adding weird double and triple corners and multiple instances of objects in the map.
Can somebody point me to what error in my input or robot description is causing this, and how I could adjust and test it?
I am at a loss and ready to scrap my project, which is very sad.
Thank you.


Have you tried setting the Fixed Frame parameter to something static, like world?