
Create world frame
I need to use the SVO package for Visual Odometry, so I need the world frame because it gives me the pose relative to that frame, but I'm not using it so I need to create it.
This is a simplified tf_frame graph of my project:
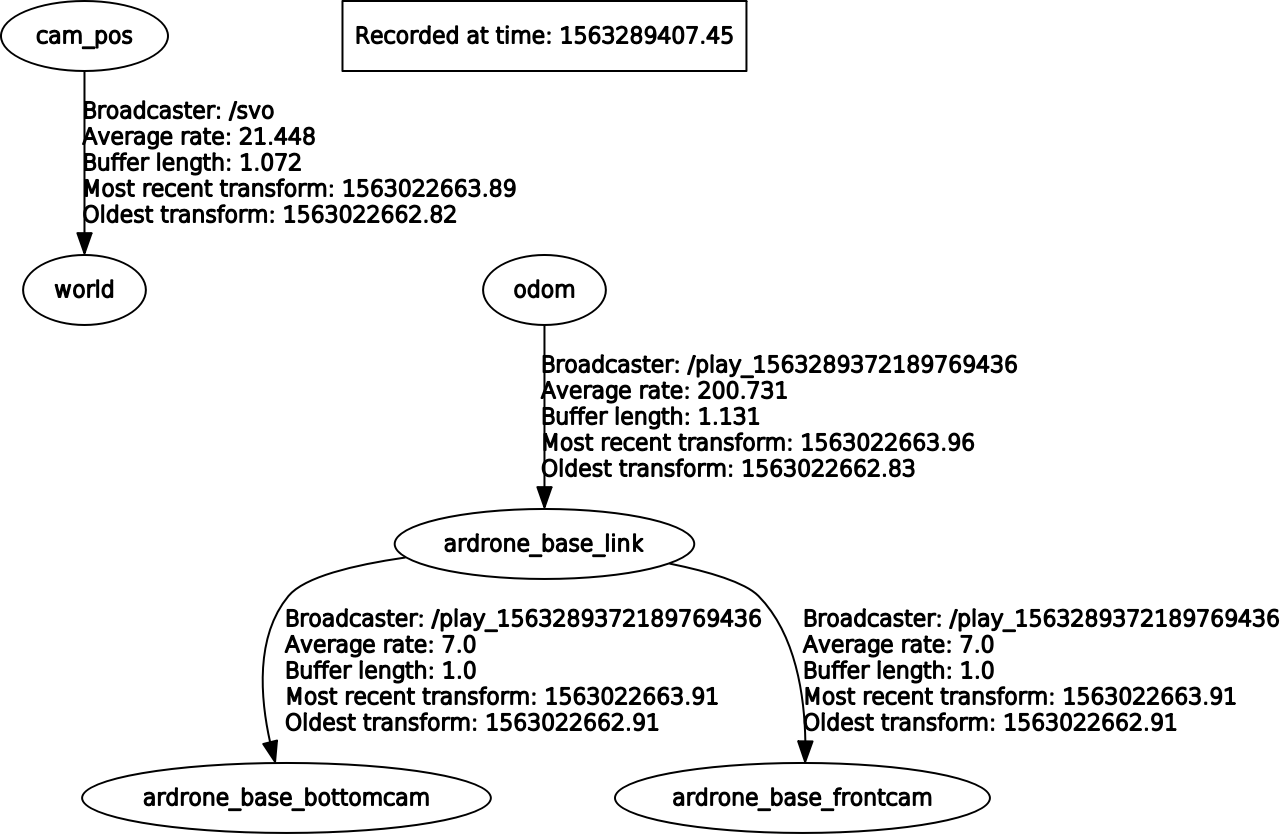
and I would like to create a broadcast between odom and world, or between any frame and world. What do you suggest?
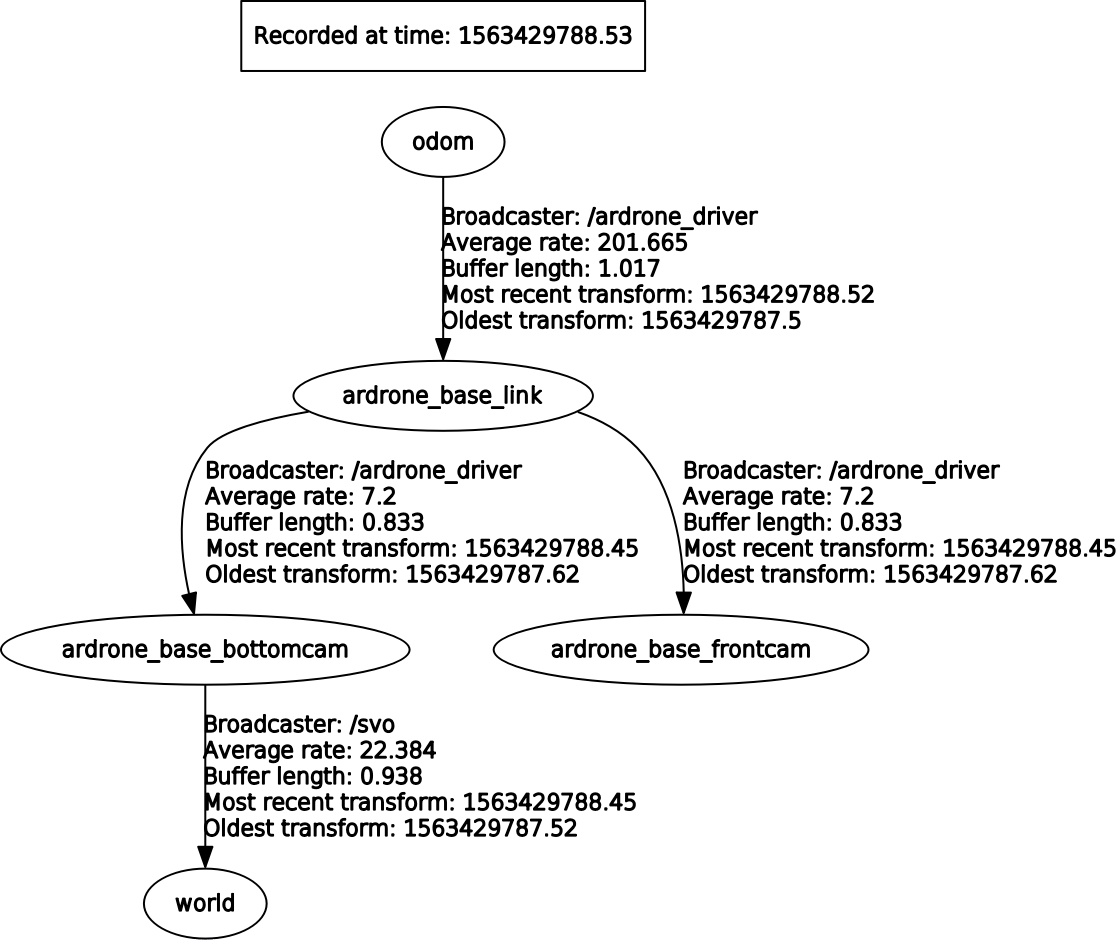
Edit: with the help of PeteBlackerThe3rd, now the rqt_tf_tree is:
add a comment

