
How to publish a map frame?
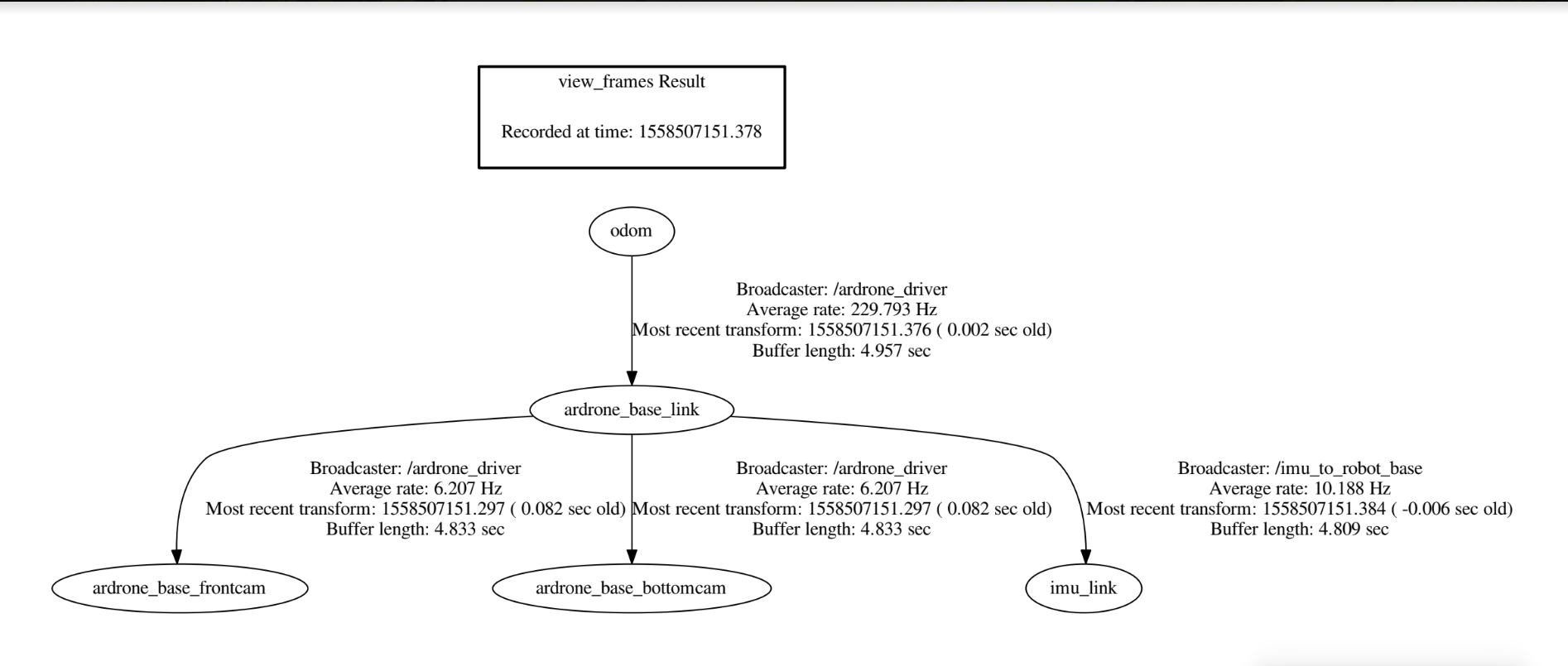
I'm working on ardrone2.0. I'm trying to fuse odometry and imu through robot_localisation. It works fine in simulation. I'm achieving tf tree like map>odom>base_link>imu. But when I want to try that on the real drone, I don't know how to publish a map frame like a coordinate system. In the simulation, the gazebo provides a map frame through map_server. But in the real world how to publish that frame? My tf tree looks like this:
Thanks in advance :)

Could you also post your tf tree when you are running your simulation on Gazebo?