Help with setting up navigation stack for two kuka youbots
Hello,
I am currently doing a project with two kuka youbots running ros hydro and ubuntu 12.04. I plan on controlling them with an external computer running a master node. I was able to setup the navigation stack in Gazebo and RVIZ, and it works fine. However, I am having issues when trying to implement the navigation stack on the real platforms.
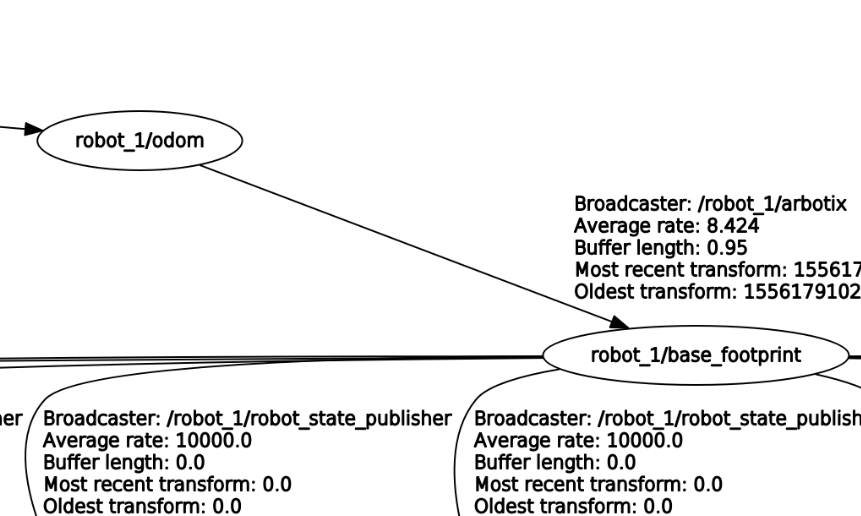
My issue is when I launch both of the real drivers (i.e. youbot_driver.launch) they both publish the same "odom" topic that is connected to the "base_footprint" frame. Since both youbots have the same topic and frame names, I get "TF_OLD_DATA" warnings for "odom" and "base_footprint". In simulation, I was able to fix this by remapping the topic and frame to include the robots name(i.e youbot1 or youbot2) before each topic and everything worked fine. This was done using "group_ns" and remapping args.
Now, when I tried to use remapping args on the real platforms, the robots name would get published before every topic except for odom and frame "base_footprint". Even when I set the "odom_frame", "odom_topic" and "robot_base_frame" parameters to "robot_name/odom" or "robot_name/base_footprint" in youbot_driver.launch, the tf_tree output still shows only odom and base_footprint without the robot name prefix.
How can remap odom and basefootprint in "youbot_driver.launch" to match what I am seeing in simulation? I feel like I have exhausted the forums on remapping topics and using tf_prefix, so any information would help,
Thanks.