
How is the end effector in MoveIt! suppposed to be used?

In the MoveIt! Setup Assistant 2.0, there is a tag "End Effectors", which content translates to the <end_effector> tags of the robot.srdf file.
What is this good for and how was it meant to be used? Given you have one simple robotic manipulator similar to the one on the picture bellow.
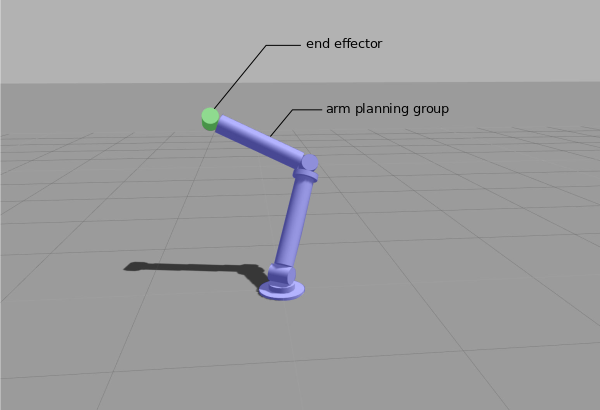
Say I want the possition of the link marked as 'end effector' to be controlled by the MoveIt! planner. So I tell the MoveIt! "Move the manipulator in such a way, that this link ends up at coordinates [0.2, 0.1, 1.0]." and it plans the trajectories of the whole arm to satisfy this instruction. How should I set the end effector element and planning groups?

you can set the whole arm as a group and the last link without parent as end_effector