
Size of the Calibration Pattern for the ECTO Recognition Kitchen
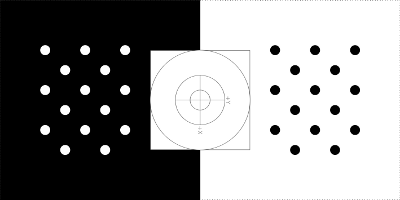
I wonder how large the circle-based calibration pattern for capturing model data ought to be? See this pattern referenced by this tutorial. What is the diameter of one circle? What is the size of the black rectangle?
I assume that the size of the pattern might influence the scale of the 6D pose estimates and finding the right size probably makes the recovery of pose estimates from the calibration pattern more robust while capturing data. Unfortunately, the masking does not work, which involves setting a bounding box, so I don't want to deviate from the setup used by the developers.
The tutorial tells me to print out "a full size" version of the dot pattern, which is provided as a scalable vector graphics file. Opening it in Eye of Gnome, the dot pattern spans 1421x2838 pixels, i.e. roughly an aspect ratio of 1:2.
A file "notes.txt" tells me
1 width 0.4 meters
2 height 0.8 meters
3
4 hmmm... rotated on side
5
6 black dots on white:
7 offset_x = -.310 meters
8 offset_y = -.10
9
10 white dots on black:
11 offset_x = .150 #TODO: FIXME hard coded
12 offset_y = -.10
And some video on the tutorial also suggests a printout as least four times the area of DIN A4. Are the values 0.4m and 0.8m correct?


{kind=link}