
Trouble moving rover from rtabmapviz
I have recorded and localized my rover on a map generated on RTAB-Map.
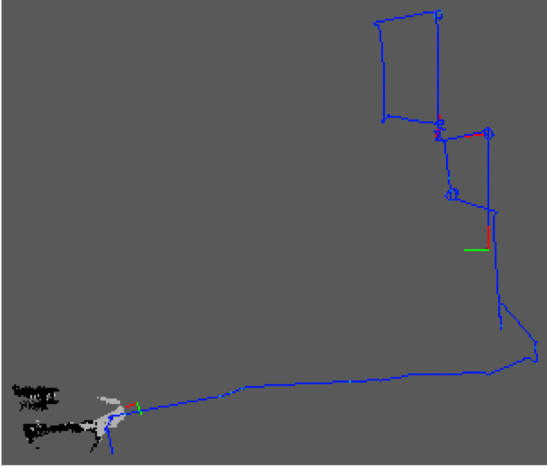
When I send a goal, I can see it calculating the route.
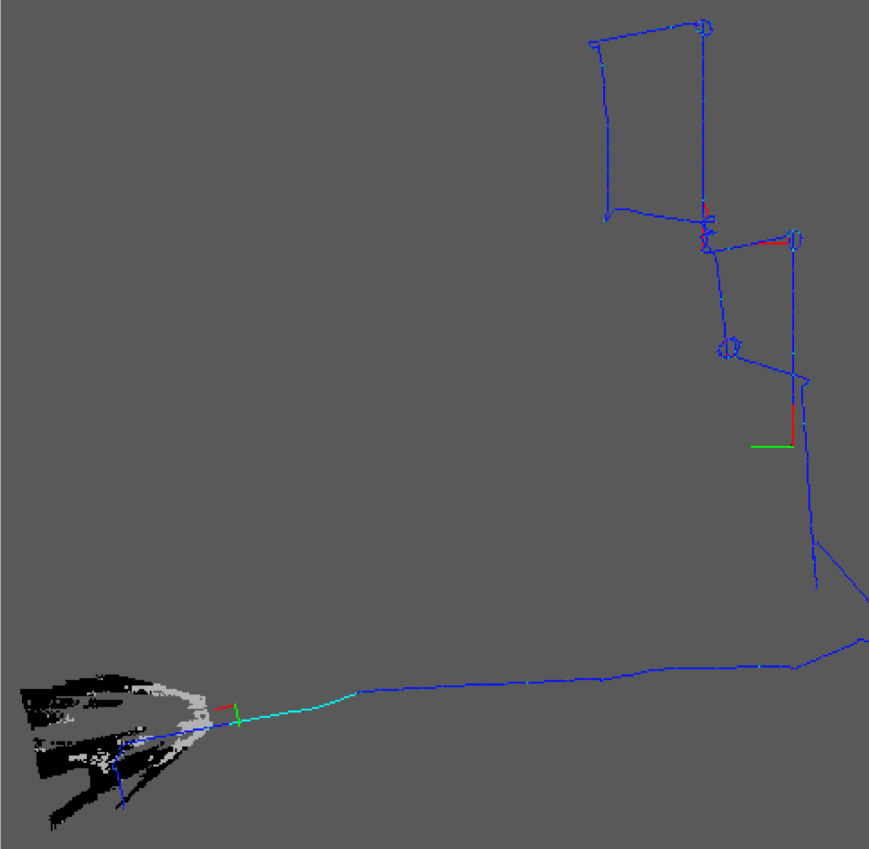
But the rover doesn't move. :(
I have remapped grid_map to map.
<remap from="grid_map" to="/map"/>
The /cmd_vel topic is empty.
I am using the following parameters to launch move_base
<launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" outpu$
<param name="base_global_planner" value="navfn/NavfnROS"/>
<param name="base_local_planner" value="addwa_local_planner/ADDWAPlannerROS$
<rosparam file="$(find nav_test)/config/fake/costmap_common_params.yaml" co$
<rosparam file="$(find nav_test)/config/fake/costmap_common_params.yaml" co$
<rosparam file="$(find nav_test)/config/fake/local_costmap_params.yaml" com$
<rosparam file="$(find nav_test)/config/fake/global_costmap_params.yaml" co$
<rosparam file="$(find nav_test)/config/fake/base_local_planner_params2.yam$
</node>
</launch>
move_base seems to launch fine, but when rtab_map localizes and publishes the map, I get the following warning: (I get this warning before I send a goal)
[ WARN] [1552382399.156435540]: MSG to TF: Quaternion Not Properly Normalized
I have tried resetting the odometry in rtabmapviz (Detection->"Reset odometry") as suggested in here
How would I go about debugging this?
Please note that I am new to ROS, so it is entirely possible that I have missed a step somewhere.
Let me know if you need any info about my setup.

Are you using the ROS navigation stack or something similar? What nodes are running when you try this? For example, generate with 'rostopic list' in a new window and see if you have the move_base nodes running.
Turns out, I didn't have move_base running. I launched move_base and I still can't get the rover to move. :( I have updated the question with my move_base launch parameters.
I suggest first to bypass rtabmap planning and send goal directly to /move_base_simple/goal to debug that part and make the robot move. Afterwards, you may look into rtabmap planning.