
Turtlebot SLAM/RViz - Error in RobotModel (No Transform from wheel_right_link to Base_link
Following Setup is used: -Turtlebot3 -Remote PC (Win10 and Ubuntu 16.04 LTS Bash)
Following issue exists:
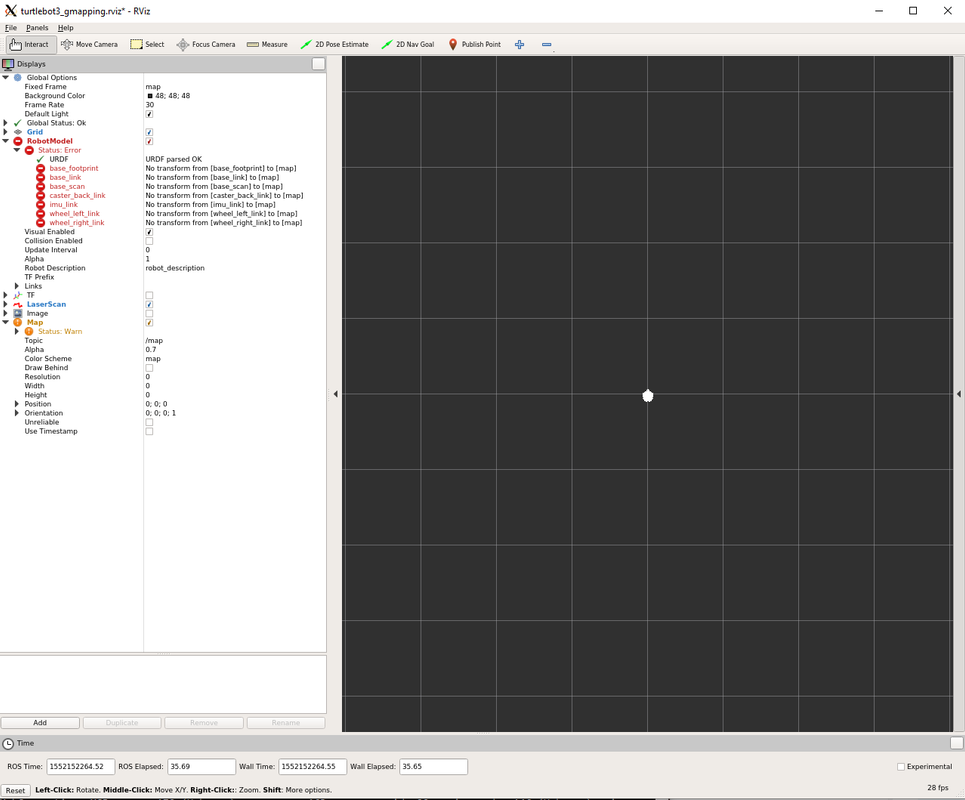
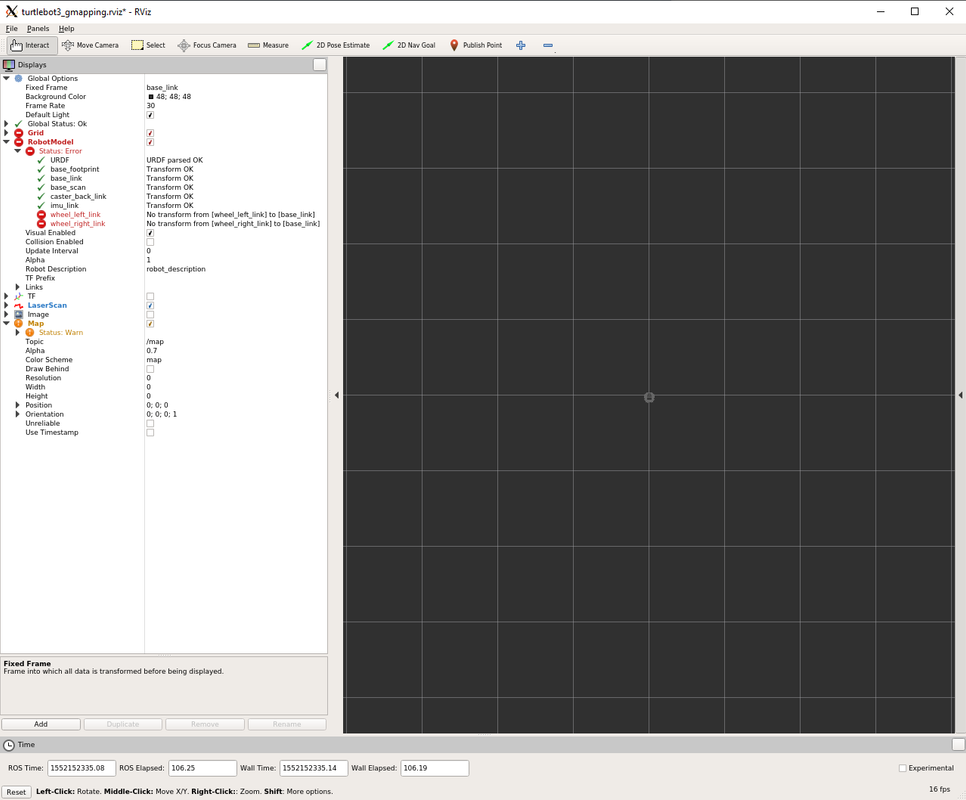
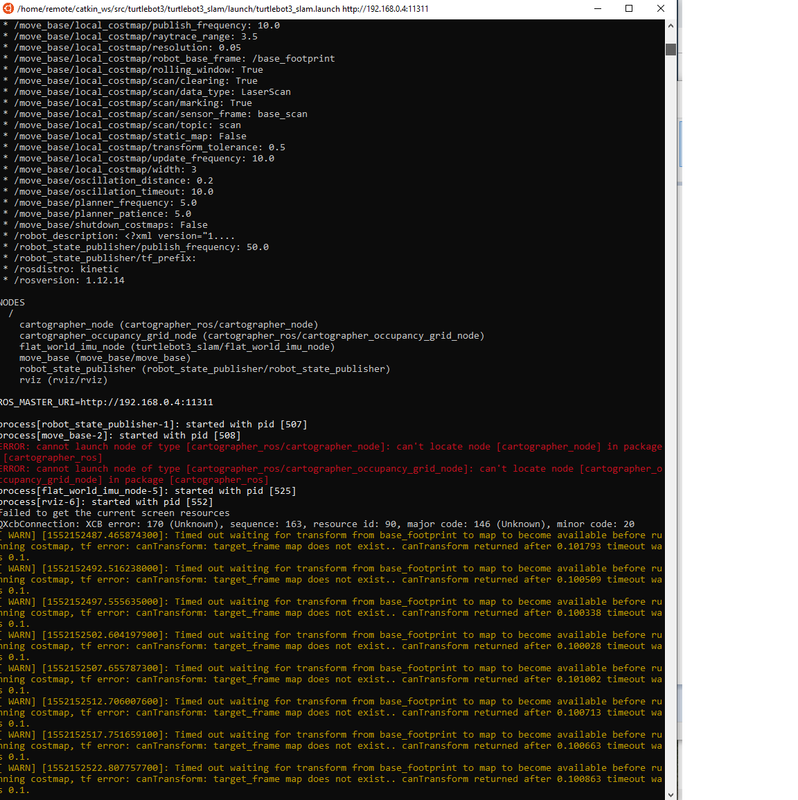
Before installing and starting SLAM data it was possible to control the Turtlebot with Keyboard Teleoperation (w a s d x). After installing and starting RViz it is no more possible to run teleoperation (it may has something to do with the link between dynamixel RViz). In RViz Tree there is an Error in Robot Model. If I Change Global Settings from [map] to [base_link] some errors are fixed but the Error „No Transform from [wheel_left_link] to [base_link] is still existing. In addition to this, In Ubuntu Console of the Remote PC Shows Error (as Shown in figure 3).
Figure 1: global settings [maps] Figure 2: global setting [base_link] Figure 3: ubuntu console with warning
https://i.postimg.cc/FHHW0YwK/Figure-...

{kind=link}
{kind=link}
{kind=link}