
tips to improve gmapping results

Greetings,
I am running slam_gmapping ( gmapping ) in PioneerAT with Sick LMS200 on ROS Diamondback. I am using slam_gmapping_pr2.launch from gmapping package. Following picture shows the result. TF defined is also visible in image.
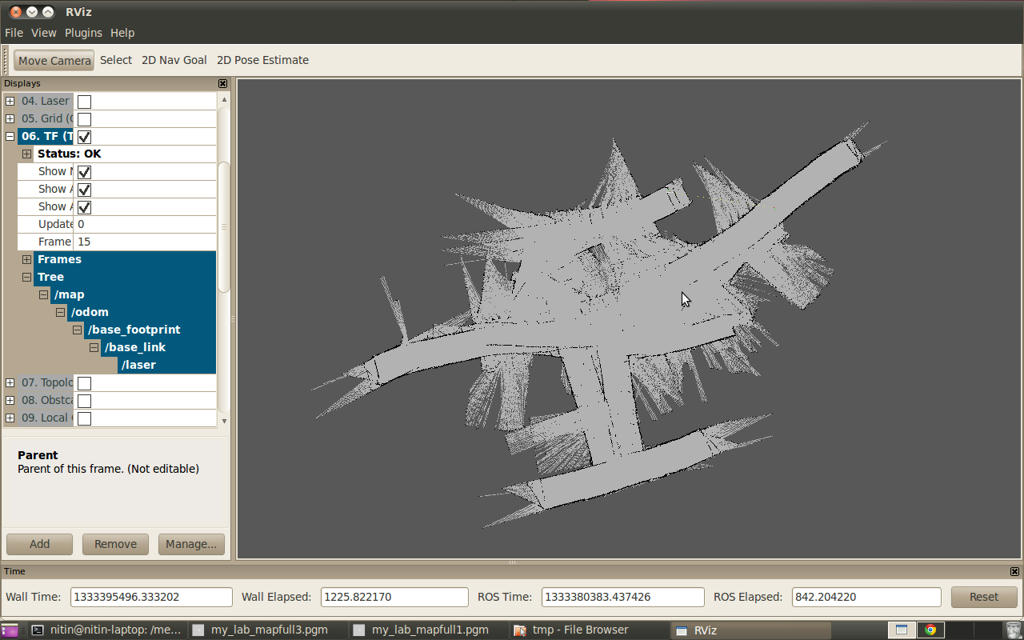
The map is curved on straight corridors. Parallel corridors are merged. A small circular move (loop ~ radius 3meters, at center) is not detected. One corridor has come twice (parallel,joined) due to some problem.
I tried changing the launch file and used following:
<launch>
<param name="use_sim_time" value="true"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<!-- <remap from="scan" to="scan"/>-->
<param name="odom_frame" value="/RosAria/pose"/>
<param name="map_udpate_interval" value="2.0"/>
<param name="maxUrange" value="12.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
</launch>
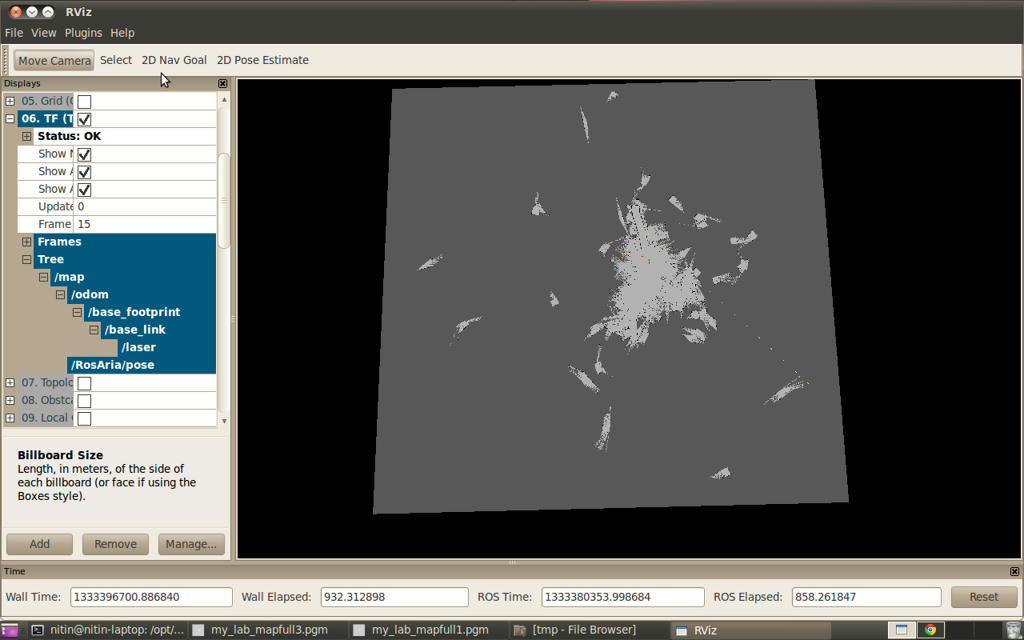
This resulted in even worse map shown in picture below:
Scan Matching Failed, using odometry. Likelihood=-90.753
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry. Likelihood=-297.351
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry. Likelihood=-822.941
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry. Likelihood=-1200
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry. Likelihood=-1200
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry. Likelihood=-987.667
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry. Likelihood=-1200
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry. Likelihood=-257.575
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry. Likelihood=-1200
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry. Likelihood=-216.73
lp:18.5471 -20.6458 -1.92343
op:18.1182 -5.70109 1.08139
Scan Matching Failed, using odometry ...add a comment

