
Gazebo model and rviz model are different.
Hello,all. I'm trying to make a snake robot on gazebo simulation environment. I am trying to run my simulation model on gazebo 7, ubuntu 16.04, and ros kinetic. I am trying to run my code on nvidia quadro 5000 model
This is my github repository link: https://github.com/Jinhyeok1489/snake... In this case, I've found that my gazebo model is different from rviz model which I expect.
I've launched my launch files spawn_with_controllers.launch, spawn_rviz.launch and gazebo_ros empty_world.launch. And I executed rviz rviz command. Adding robot model and tf, my model is shown as expected. However, I cannot see the model as expected on gazebo environment.
I wish to add my errors but there seems no errors on my code. But interesting thing is that I can't change the point where simulation is get started even if I change the params on launch file. Also, there's warning .
[ WARN] [1542479125.695690940, 0.136000000]: Deprecated syntax, please prepend 'hardware_interface/' to 'EffortJointInterface' within the <hardwareInterface> tag in joint 'joint1'.
[ WARN] [1542479125.697017328, 0.136000000]: Deprecated syntax, please prepend 'hardware_interface/' to 'EffortJointInterface' within the <hardwareInterface> tag in joint 'joint2'.
[ WARN] [1542479125.697964651, 0.136000000]: Deprecated syntax, please prepend 'hardware_interface/' to 'EffortJointInterface' within the <hardwareInterface> tag in joint 'joint3'.
[ WARN] [1542479125.698813692, 0.136000000]: Deprecated syntax, please prepend 'hardware_interface/' to 'EffortJointInterface' within the <hardwareInterface> tag in joint 'joint4'.
[ WARN] [1542479125.699341420, 0.136000000]: Deprecated syntax, please prepend 'hardware_interface/' to 'EffortJointInterface' within the <hardwareInterface> tag in joint 'joint5'.
[ WARN] [1542479125.700246770, 0.136000000]: Deprecated syntax, please prepend 'hardware_interface/' to 'EffortJointInterface' within the <hardwareInterface> tag in joint 'joint6'.
However, as far as I know, this warning codes doesn't affect anything on executing my code.
I want to know what's wrong with my urdf model or executing on gazebo. Thanks in advance. : )
-----------------------------------------Edited thanks to @gvdhooorn ---------------------------------------------------------- Thanks to @gvdhooorn, I can insert my captures of environment.
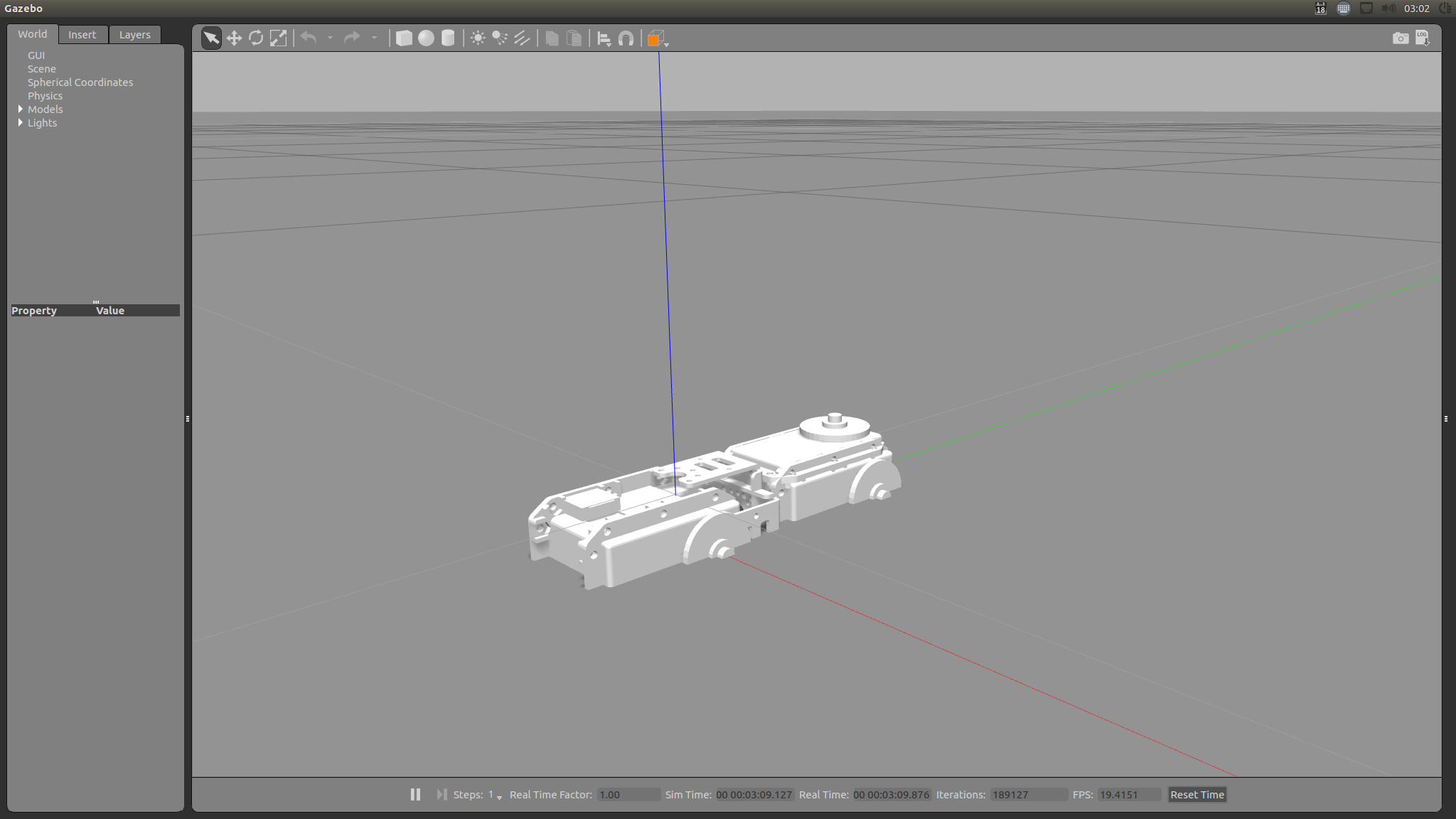
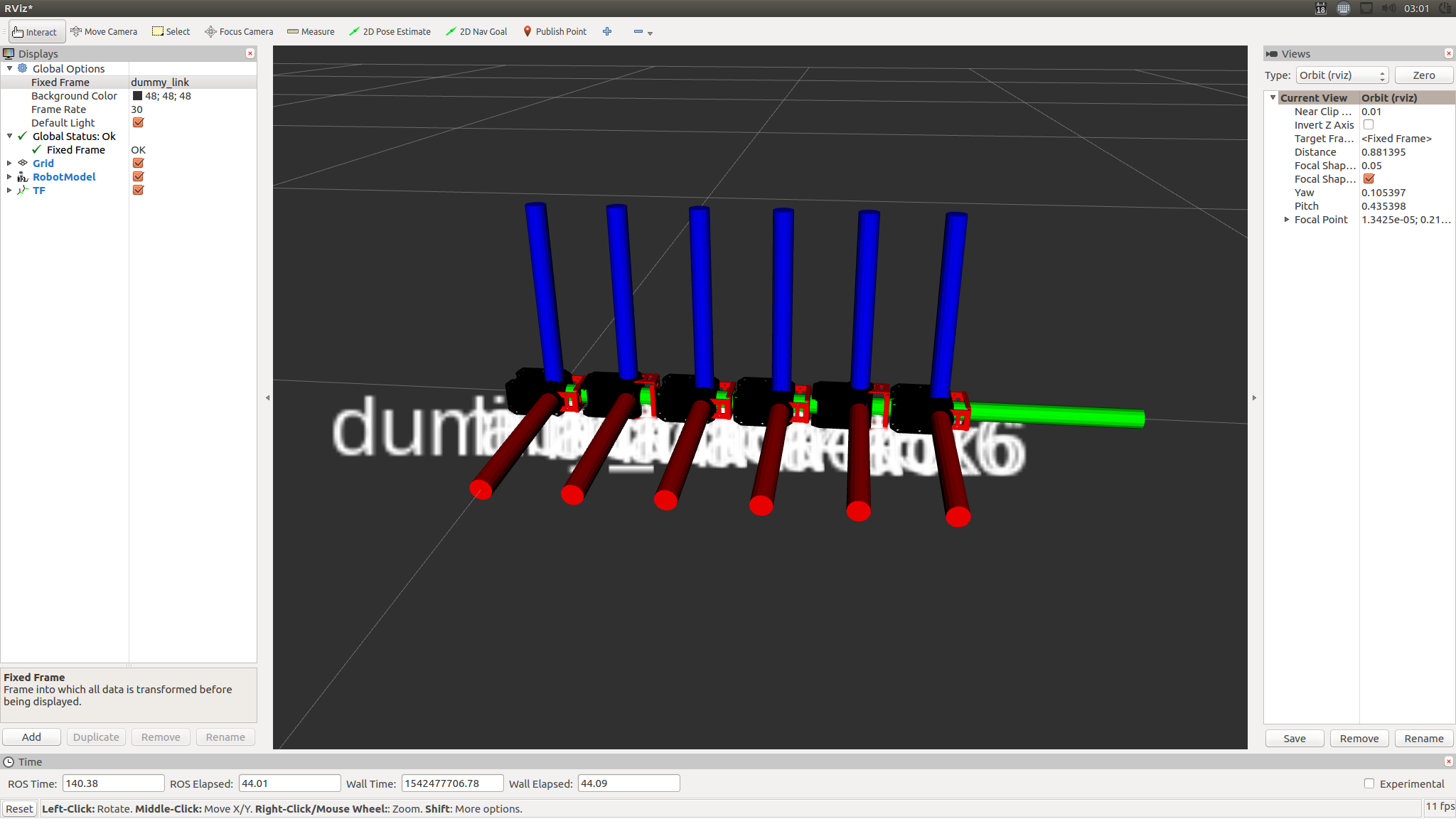
As far as I know, there's difference on gazebo simulator (because it simulates physically) while rviz is a visualization tool. But I cannot understand what's wrong with my code. As you see in pictures, things collapse in gazebo environment even if I could see the model as I expected in rviz. Does this can mean that my urdf file is not wrong and any setting for conneting gazebo went wrong?Thanks again.

It would be good if you could expand your description of the problem a bit more. What exactly do you mean by "different"? If possible, add a screenshot or two. I've given you enough karma for that.