
Could not transform the global plan to the frame of the controller

Hello,
I am using the husky mobile base with ros kinetic. I am using hector_mapping for getting the map and using move_base for sending simple 2D navigation goal. I additionally tried using the map_server to save the map and use the map with amcl and move_base. I am assuming this is mostly coming from move_base. However In either case whenever I pass a 2D navigation goal. I start receiving:
[ INFO] [1538375948.914403476]: Got new plan
[ERROR] [1538375948.914494414]: Extrapolation Error: Lookup would require extrapolation into the future. Requested time 1538375948.918941058 but the latest data is at time 1538375948.914756447, when looking up transform from frame [odom] to frame [map]
[ERROR] [1538375948.914534395]: Global Frame: odom Plan Frame size 50: map
[ WARN] [1538375948.914546917]: Could not transform the global plan to the frame of the controller
[ERROR] [1538375948.914558586]: Could not get local plan
I came across couple of posts: like this one . I synced the clock. Here is tf_monitor output:
base_link to odom:
RESULTS: for base_link to odom
Chain is: base_link -> odom
Net delay avg = -0.0313133: max = 0.0478765
odom to map RESULTS: for odom to map Chain is: odom -> map Net delay avg = -0.0281289: max = 0.000102856
Frames:
All Broadcasters:
Node: unknown_publisher 85.9467 Hz, Average Delay: -0.00285203 Max Delay: 0.339757
Node: unknown_publisher(static) 1e+08 Hz, Average Delay: 0 Max Delay: 0
base_link to map
RESULTS: for base_link to map
Chain is: base_link -> odom -> map
Net delay avg = -0.0273669: max = 0
Frames:
Frame: base_link published by unknown_publisher Average Delay: 0.00281878 Max Delay: 0.0196072
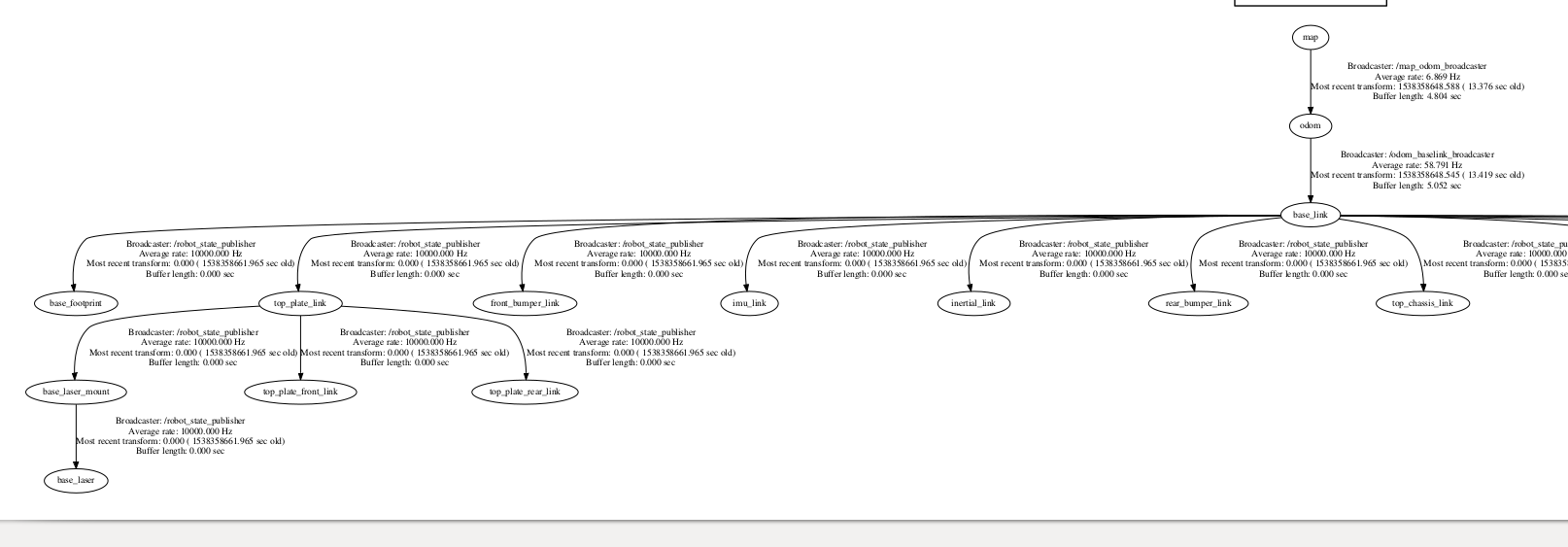
Also attached is the tf tree for move_base and amcl.tf_tree rqt_graph
costmap_common.yaml
footprint: [[-0.5, -0.33], [-0.5, 0.33], [0.5, 0.33], [0.5, -0.33]]
footprint_padding: 0.01
robot_base_frame: base_link
update_frequency: 4.0
publish_frequency: 3.0
transform_tolerance: 0.5
resolution: 0.05
obstacle_range: 1.5
raytrace_range: 6.0
#layer definitions
static:
map_topic: /map
subscribe_to_updates: true
obstacles_laser:
observation_sources: laser
laser: {data_type: LaserScan, clearing: true, marking: true, topic: /r2000_node/scan, inf_is_valid: true}
inflation:
inflation_radius: 1.0
cribe_to_updates: true
obstacles_laser:
observation_sources: laser
laser: {data_type: LaserScan, clearing: true, marking: true, topic: /r2000_node/scan, inf_is_valid: true}
inflation:
inflation_radius: 1.0
I have not changed much in the other config files that are under husky_navigation.
Any suggestion is greatly appreciated



{kind=link}
{kind=link}
I don't think that this is the reason for your error but
obstacle_layeris misspelt asobstacles_laserin costmap_common.yaml. And the section is repeated twice.Also, were you able to figure this one out? I have been struggling with this for the past 3 days.