Confused with amcl map to odom transform

I am using amcl for localizing my robot in Gazebo in a known map. My robot has an IMU and a laser on it.
I was going through the amcl docs and I noticed this.
Published Topics
...
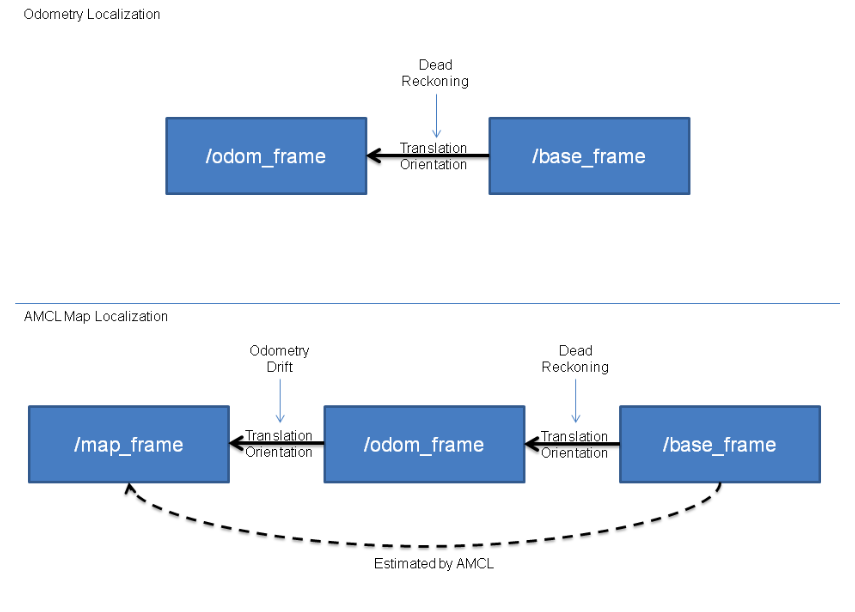
tf (tf/tfMessage)
Publishes the transform from odom (which can be remapped via the ~odom_frame_id parameter) to map.
According to REP-105, both odom & map are world fixed frames. So why does amcl publish a transform from map to odom? Shouldn't this transform be static?
Note: Although it is not relevant to this question, but if you are wondering - I am generating the odometry data using package robot_localization, which takes as input the IMU data. amcl requires odometry and laser scan data to localize the robot.
add a comment