
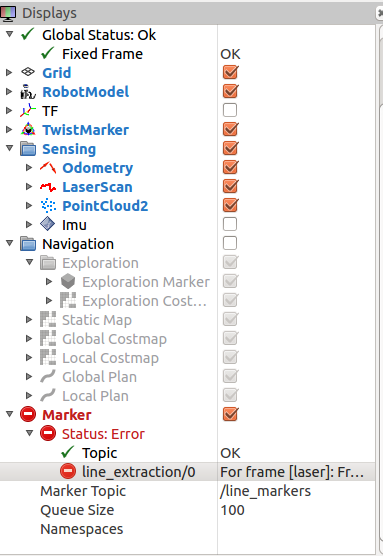
For frame [laser]: Frame [laser] does not exist
I am running ubuntu 14.4 indigo. I downloaded this line extraction packet..
I then roslaunch husky_gazebo husky_playpen.launch and roslaunch husky_viz view_robot.launch to start a husky simulation. Then, I followed the line extraction package instruction and started roslaunch example.launch. I checked that both /line_segments and /line_markers are giving me outputs by rostopic echo. Now, I am trying to make the line marker show up on rivz, but I am running into the following error when I added the marker For frame [laser]: Frame [laser] does not exist a picture is shown below:
anyone have suggestions on this? thank you.
add a comment

