
Configuring turtlebot3_slam_gmapping
Is there a way to unsubscribing the turtlebot3_slam_gmapping node from the topic /scan and in place of that, subscribing turtlebot3_slamp_gmapping to a topic published by /scan_to_scan_filter_chain ? To elaborate, I want SLAM node to get filtered information from the node scan_to_scan_filter_chain rather than the original information from the /turtlebot_lds.
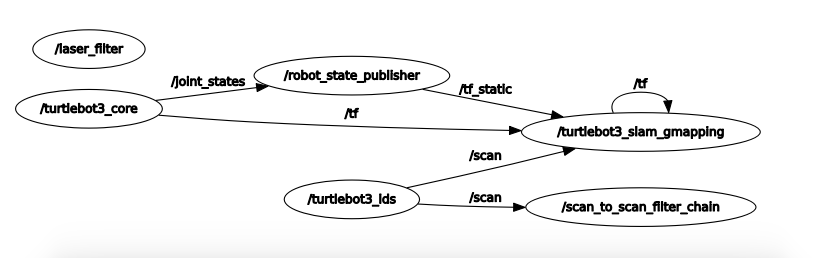
rqt_graph:

Are you asking about changing the topic that
gmappingpublishes to?@jayess nope, I'm just asking about changing the topic of subscription for turtlebot3_slam_gmapping from turtlebot3_lds to scan_to_scan_filter_chain.