
ros does not show any debug messages
So, I am trying to debug a package, and was thinking of using ROS_DEBUG() AND ROS_DEBUG_STREAM() to print out all my variables on either rqt_console or the /rosout topic following this site.
So I added the following lines in the cpp file:
ROS_DEBUG("HELLO %s", "world");
ROS_DEBUG_STREAM("hello " << "world");
SERIAL_EXCEPT(SerialException, "buffer filled without end of line being found");
Also, I tried to put the debugging messages at the beginning of the main loop, shown below:
int main(int argc, char **argv)
{
ros::init(argc, argv, "dsp3000");
ROS_DEBUG("Hello %s", "world");
ROS_DEBUG_STREAM("Hello " << "world");
string port_name;
ros::param::param<std::string>("~port", port_name, "/dev/ttyUSB0");
int32_t mode;
ros::param::param<int32_t>("~mode", mode, KVH_DSP3000_RATE);
Here is a picture of rqt_console:
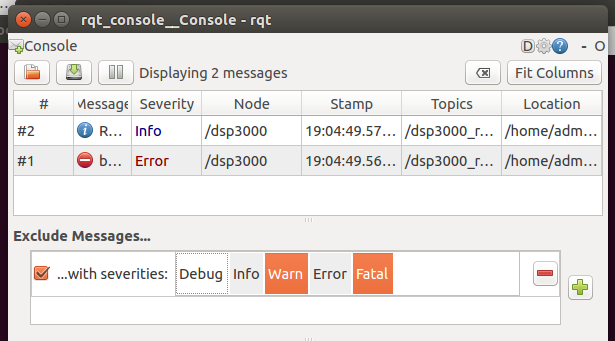 After
After catkin_make and running the node, i don't see ros.<your_package_name> anywhere, also rqt_console shows zero message in the debug option, however, ROS_ERROR & ROS_INFO messages gets printed out.
I know that my code reaches there because the the serial_exception message gets prints out.
add a comment
