
Unable to visualize .dae mesh files in RViz

Hey!
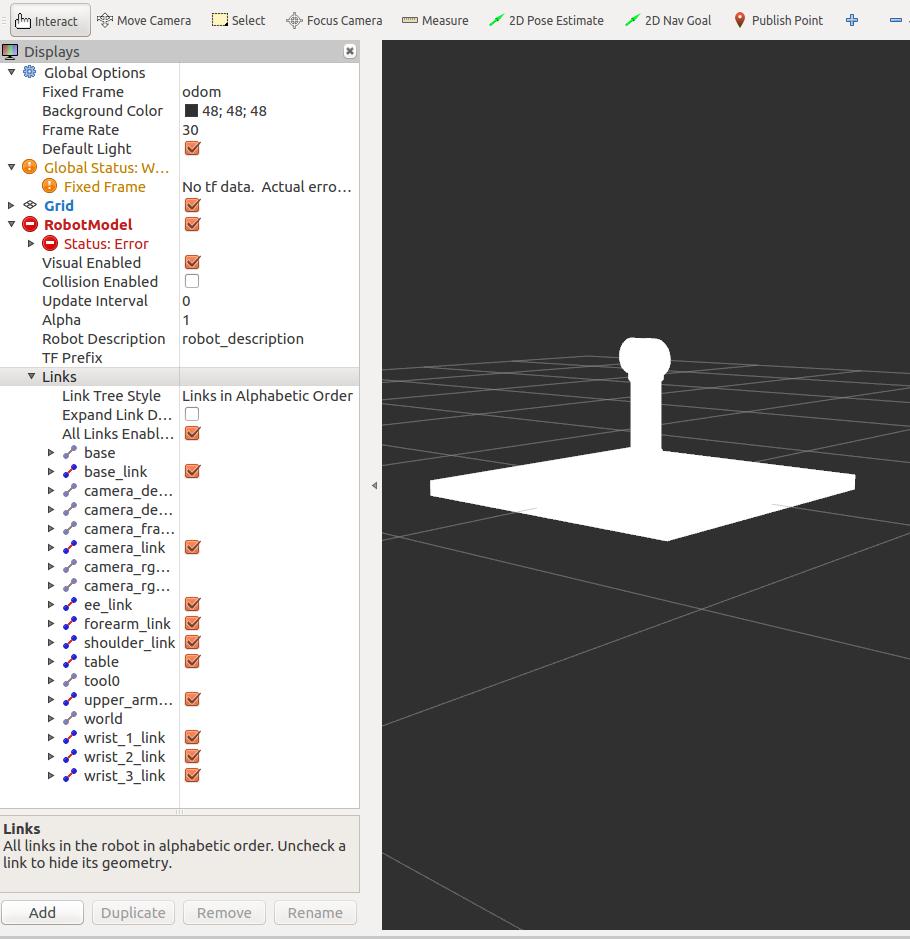
I was trying to visualize a URDF file which includes the UR5 robot with a table and a Kinect sensor in RViz. I have attached an example link description in URDF format. I am using Ubuntu 16.04 and ROS Kinetic. I have used check_urdf for the full .urdf file and it parsed successfully.
<link name="base_link">
<visual>
<geometry>
<mesh filename="file:///home/aadityacr7/ros_trial/src/universal_robot/ur_description/meshes/ur5/visual/base.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<geometry>
<mesh filename="file:///home/aadityacr7/ros_trial/src/universal_robot/ur_description/meshes/ur5/collision/base.stl"/>
</geometry>
</collision>
<inertial>
<mass value="4.0"/>
<origin rpy="0 0 0" xyz="0.0 0.0 0.0"/>
<inertia ixx="0.00443333156" ixy="0.0" ixz="0.0" iyy="0.00443333156" iyz="0.0" izz="0.0072"/>
</inertial>
</link>
This is the launch file which I am using in order to display the robot in RViz.
<launch>
<arg name="gui" default="true"/>
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find myworkcell_support)/urdf/workcell_trial3.urdf'" />
<param name="use_gui" value="$(arg gui)"/>
<node name="rviz" pkg="rviz" type="rviz" if="$(arg gui)"/>
</launch>
What could be the reason for the same?
Thanks in advance.
add a comment

