
Error in loading whycon file
I’m trying to run Whycon using ROS Kinetic with a USB camera on Ubuntu 16.04 LTS. I followed the whycon tutorial to calibrate the camera. After calibration, I ran in my home directory:
sdorman@ikon:~$ ROS_NAMESPACE=usb_cam rosrun image_proc image_proc
And in a new terminal:
sdorman@ikon:~/catkin_ws$ rosrun image_view image_view image:=usb_cam/image_rect_color This worked with no issues. I then unpacked the calibration data from the tar.gz file using $tar -xvzf and then converted the ost.txt file to an ost.ini via
sdorman@ikon:~$ mv ost.txt ost.ini
And then ran:
sdorman@daikon:~$ rosrun camera_calibration_parsers convert ost.ini whycon_transforms.yml
[ INFO] [1525377222.129394510]: Saved whycon_transforms.yml
to convert to a yml file. I sourced catkin_ws and then moved up to the whycon directory to run
sdorman@ikon:~/catkin_ws/src$ rosrun whycon whycon _targets:=1
Here I get the error “could not load file”.
sdorman@ikon:~/catkin_ws$ rosrun whycon whycon _targets:=1
[ INFO] [1525461972.198655861]: Loading file whycon_transforms.yml
[ WARN] [1525461972.198760338]: Could not load "whycon_transforms.yml"
This error also occurs in any other directory than my catkin_ws/src folder. If I move back to ~/catkin_ws/src I get the following error.
sdorman@ikon:~/catkin_ws/src$ rosrun whycon whycon _targets:=1
[ INFO] [1525461901.679379776]: Loading file whycon_transforms.yml
terminate called after throwing an instance of 'YAML::TypedBadConversion<double>'
what(): yaml-cpp: error at line 0, column 0: bad conversion
Aborted (core dumped)
I’ve tried re-downloading Whycon and repeating the entire process but that did not work. I’m not sure where I went wrong, but any help would be appreciated.
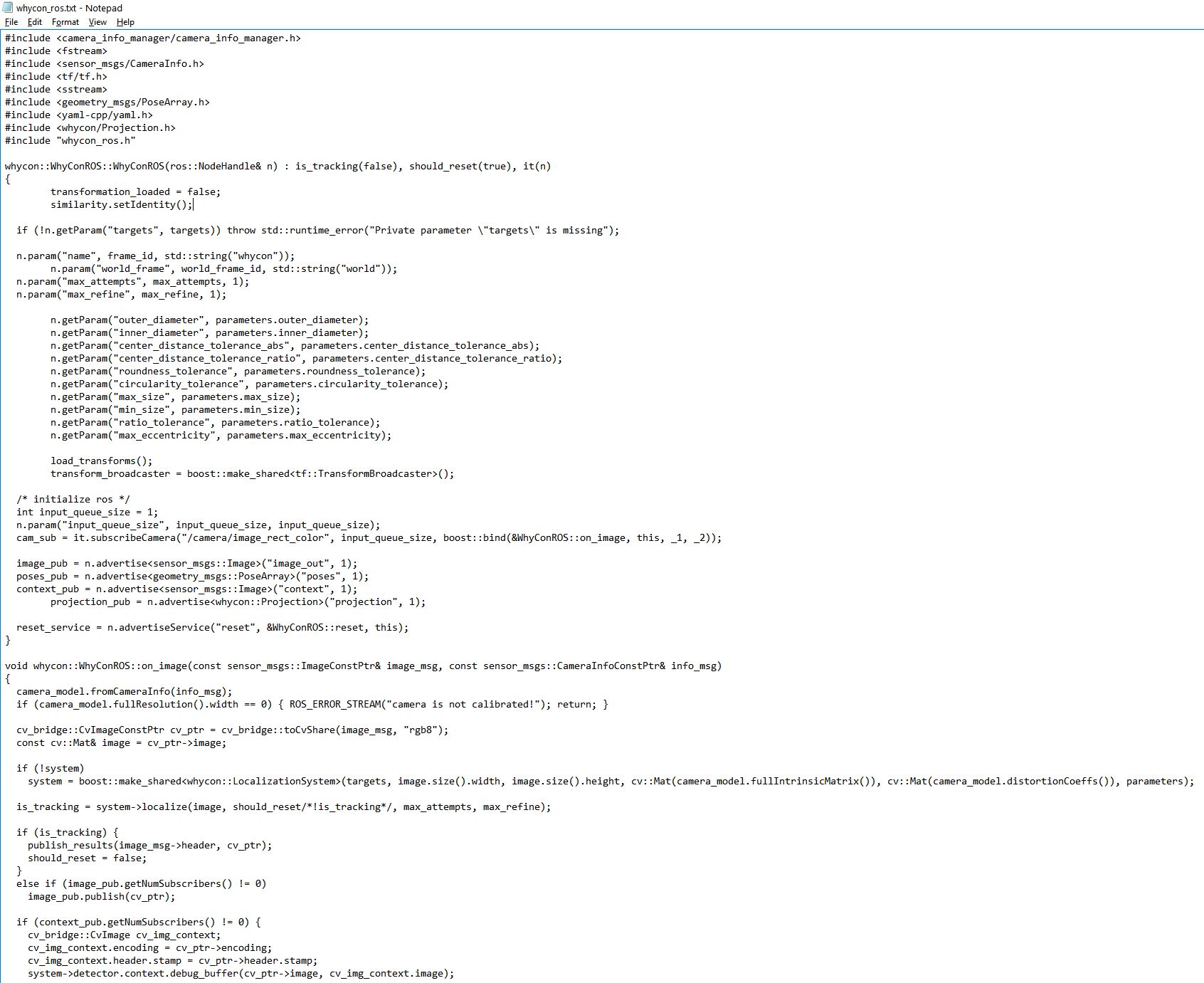
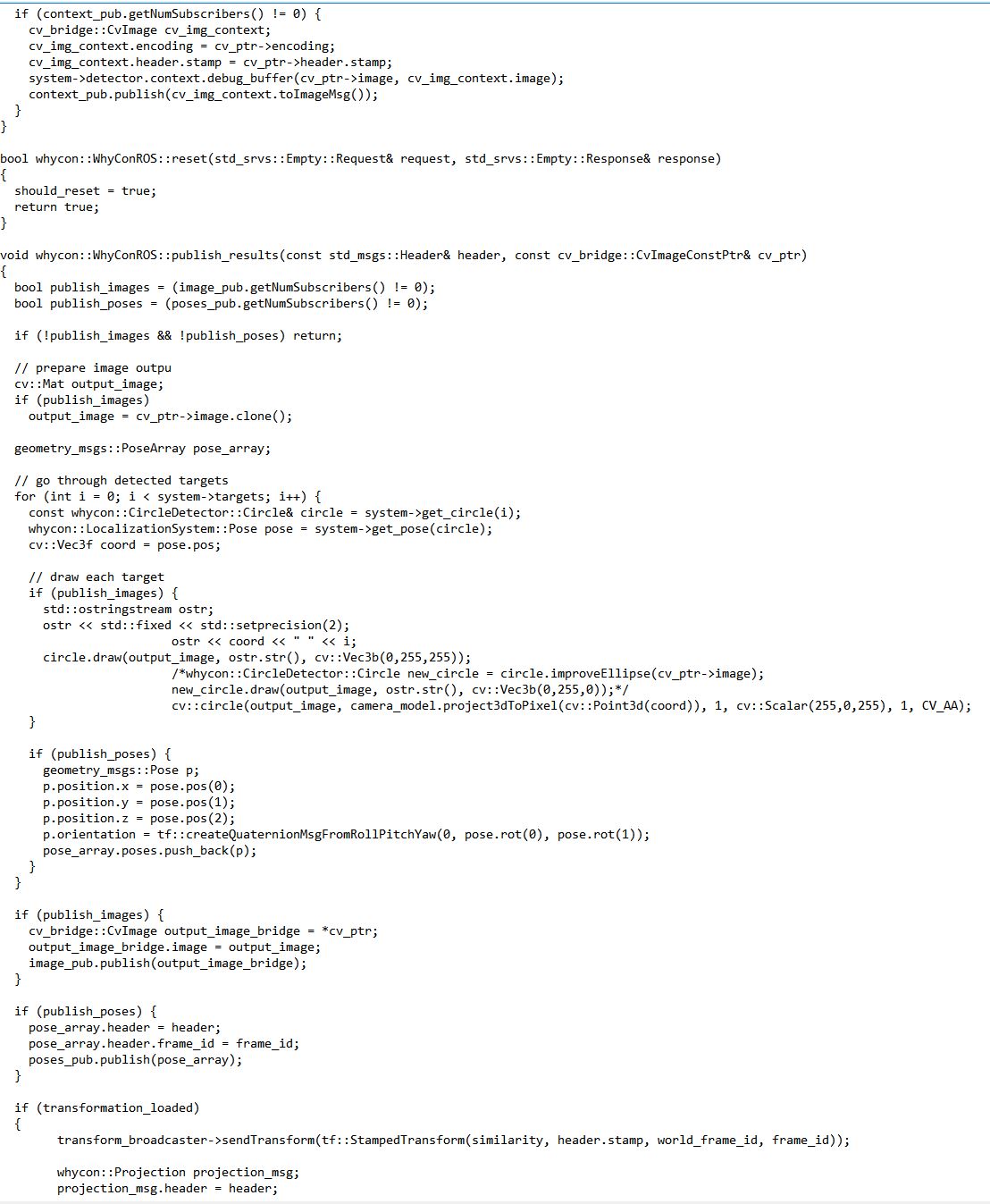
Here's the whycon_ros file:
C:\fakepath\1st part of whycon.JPG
C:\fakepath\2nd part of whcon.JPG
C:\fakepath\3rd part of whycon.JPG
WHYCON_TRANSFORMS.YML file
image_width: 640
image_height: 480
camera_name: narrow_stereo
camera_matrix:
rows: 3
cols: 3
data: [664.135327, 0, 343.103845, 0, 668.256661, 227.776189, 0, 0, 1]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [0.141424, -0.347581, 0.002344, 0.008555999999999999, 0]
rectification_matrix:
rows: 3
cols: 3
data: [1, 0, 0, 0, 1, 0, 0, 0, 1]
projection_matrix:
rows: 3
cols: 4
data: [672.257385, 0, 347.376007, 0, 0, 681.516541, 228.472198, 0, 0, 0, 1, 0]


{kind=link}
{kind=link}
{kind=link}
Sorry, I couldn't upload photos.
I've bumped your karma so you should be able to upload images now.