I will provide a general answer that could be helpful in this situation along with many other, similar situations.
If nothing is happening (or nothing is to be seen like in your case), first check rostopic list. If the topic that is causing you the problems present on the list, try rostopic echo <topic> or in your case rostopic echo /scan.
If nothing is published on the topic, you should then dorostopic info <topic> and check which node is responsible for the messages published to the topic.
Then, you should do rosnode info <node>, and set the node as the one responsible for publishing on the topic. Next, you should see if the node needs some data in order to publish to the problematic topic. What I want to say is, maybe the node publishing the /scan needs more information before it actually sends messages to the topic.
As a suggestion, you should always know exactly which node publishes which topics and how. Usually, problems like this are results of not really being sure why is something published and how exactly your nodes work.
Please check all the thing I've said and let me know if it helps.
If you have any further questions, feel free to ask and I will edit my answer.


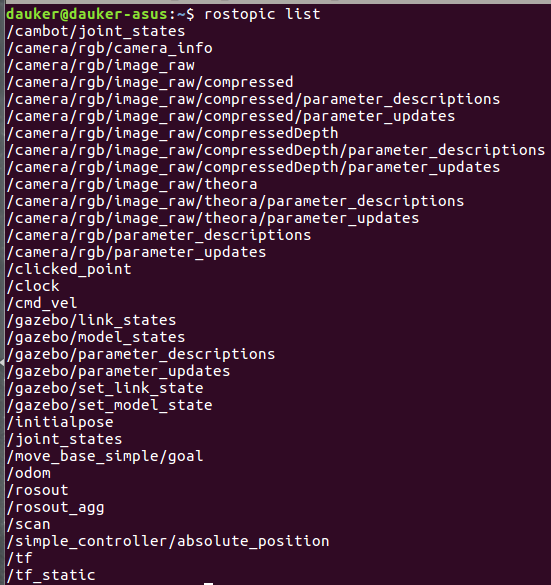


Could you please provide the output of the
rostopic list?@dljubic I just uploaded the picture you said.
Have you checked if something is published on the topic?
@jn-chen please don't post an image for text. Images are not searchable and people cannot copy and paste the text from the image.