
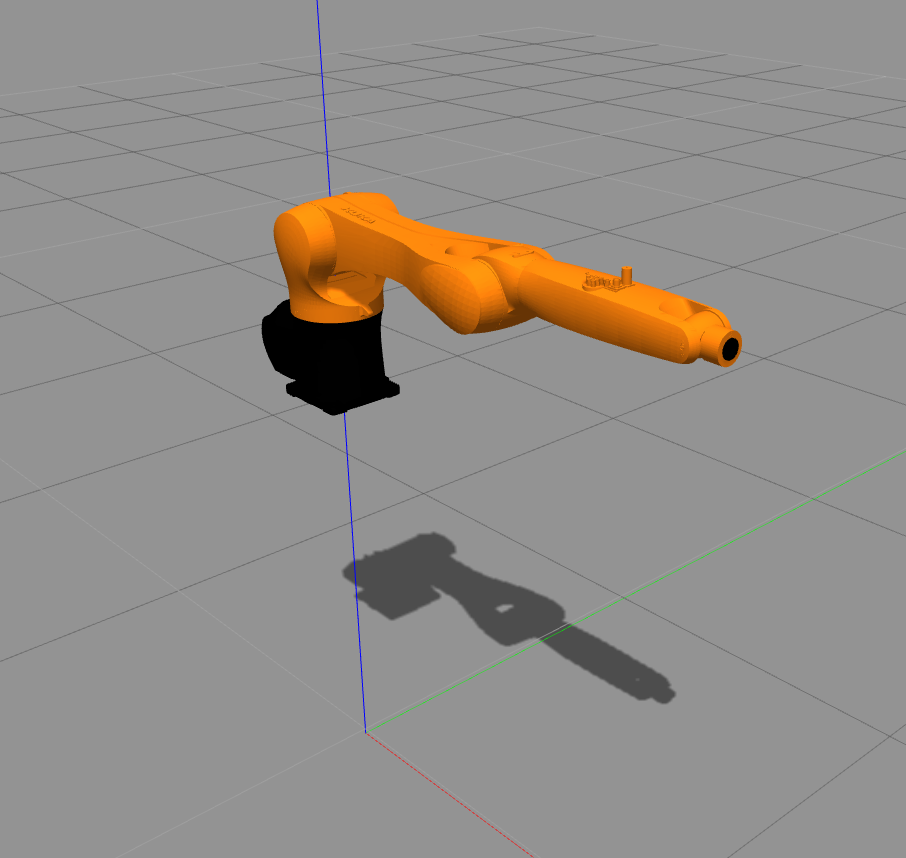
kuka kr10r1100 sixx "floats" above ground_plane in Gazebo
I'm trying to simulate kuka kr10r1100 sixx in Gazebo - so far everything works great except that the robot spawns above the ground plane - i.e. it has an offset from the origin but only in the z axis (see the image below). Originally it would spawn and then slowly fall until hitting the ground. Then I set the base_link as fixed to the world frame (and also set it as static), so now it stays like that in the "air".
I'm using ROS kinetic on Ubuntu 16.04.4.
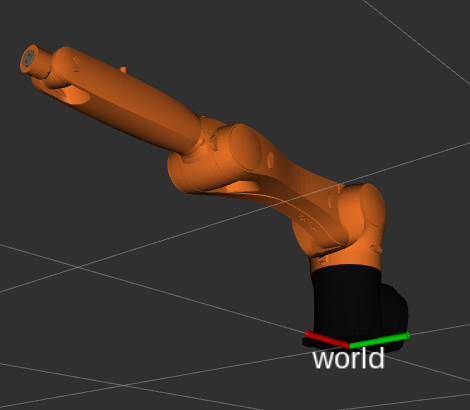
I took the kuka urdf file from the kuka_experimental repository I've checked that the STL files origin is where it supposed to be (by the way, the robot is located well in rviz (see below)). One more thing regarding rviz, it gives the following error for all the STL files:
The STL file 'package://kuka_kr10_support/meshes/kr10r1100sixx/visual/base.stl' is malformed. It starts with the word 'solid', indicating that it's an ASCII STL file, but it does not contain the word 'endsolid' so it is either a malformed ASCII STL file or it is actually a binary STL file. Trying to interpret it as a binary STL file instead.
I followed these two tutorials: tutorial1 tutorial2 to update the urdf file to work with Gazebo. I added the transmissions (I don't see how this can affect my problem), I added this:
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/kr10r1100sixx</robotNamespace>
</plugin>
</gazebo>
and I added the gazebo colors (but the problem existed before the colors). I also added inertial properties to each link because without it Gazebo wouldn't accept the urdf file. Except these changes, I did not change anything.
Did someone encountered something similar and have some suggestions how to solve it?
Thanks!
Gazebo
rviz

Not an answer, but just to make you aware of it: the
kr10r1100sixxmodel is undergoing some maintenance. See ros-industrial/kuka_experimental#104.