
map problems with gmapping
Hello all
i have a lidar lite v3 i rotate it with stepper motor to get planner lidar. i wrote a driver node, use it with gmapping node and odometry node. i get bad maps. they differ in each rotation. map image is attached.
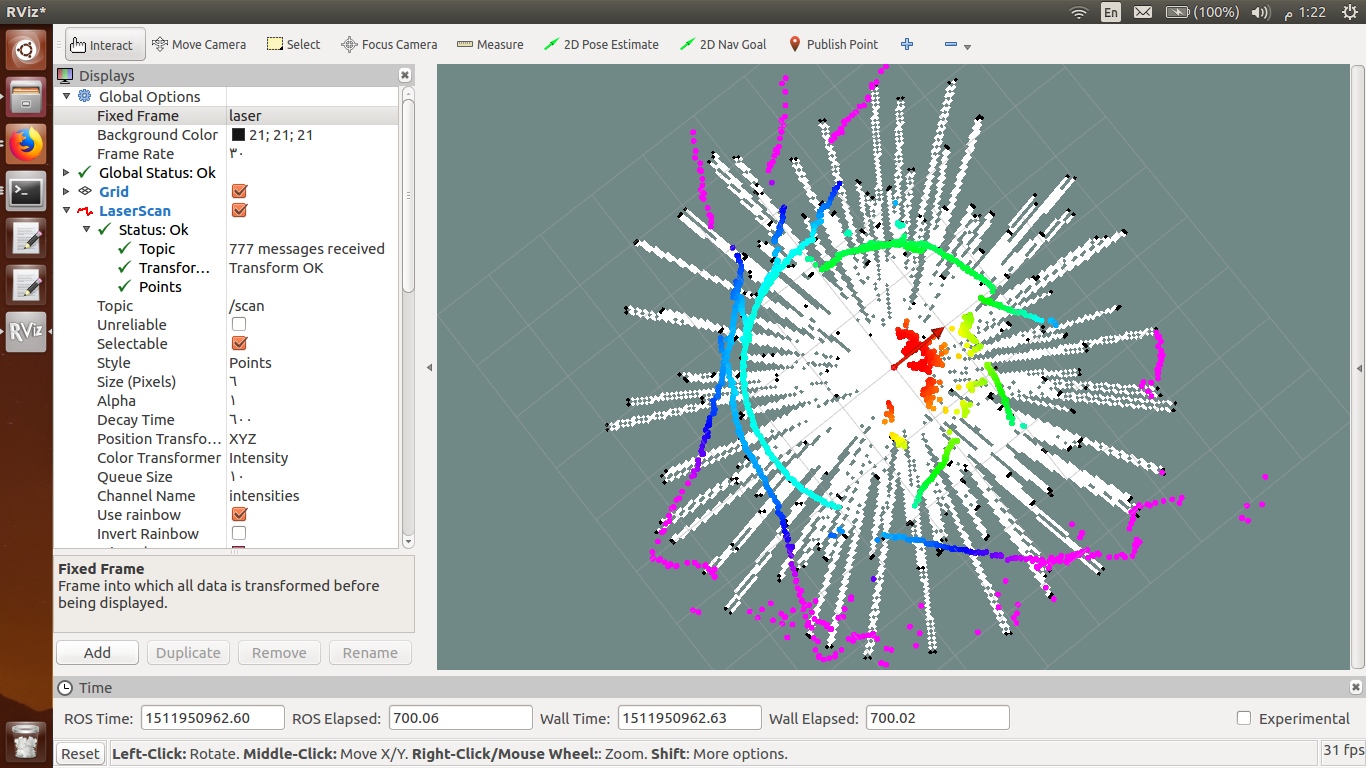

seems you have set your decay time to something :-)
What is the output of one single message of the laser? The way it looks, there seems something very wrong with your driver. But this could also be due to the decay time in the image...
@mig the output of laser is a point. i do not know what is wrong with it! the decay time lets points to stay visual more time (as i understand it)
How fast are you turning? Fast turns can result in bad maps.
@jayess how to calculate it ?
Well, you are driving it right? So you know how fast you're telling it to go? You don't need to calculate the speed. Just keep in mind that if you're getting bad results during a turn then you need to turn slower.
@jayess i don't drive the robot yet. the lidar rotates in its place. my stepper motor type is slow in its nature. it is 28BYJ-48.
How are you syncing the rotation of the laser to the scan message? The scan message format assumes that the first measurement in the message is at whatever angle the header indicates is the start. It looks like you do not sync measurements with rotation, or that the sync is not working correctly.
@billy i am using ros driver from here driver i edited it to be familiar with my lidar and stepper