
scan is not match map
When I perform navigation , rotational motion ,my scan is not match the map
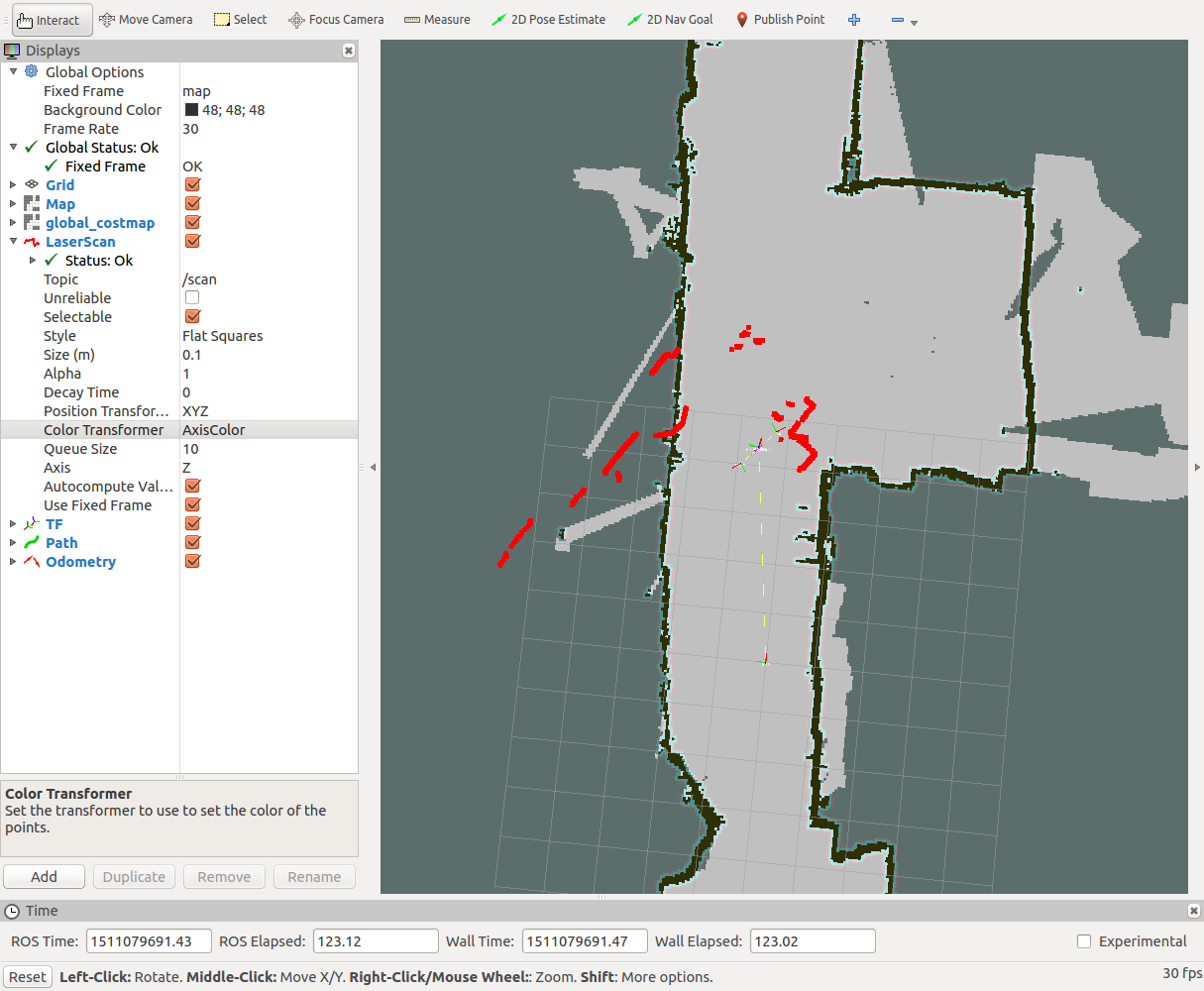
How can I solve this problem? thanks
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
When I perform navigation , rotational motion ,my scan is not match the map
How can I solve this problem? thanks
Asked: 2017-11-19 02:44:59 -0500
Seen: 198 times
Last updated: Nov 19 '17
How To? LaserScan and Odom message for navigation
erratic_navigation error before costmap
Navigation map and laser resolution
Navigation - how to use my own Local and Global costmaps?
rviz imported map resize for navigation [closed]
How to resolve RobotModel and Costmap error?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
did you solve it ?